RFID導購機器人導航與控制系統的設計研究

2.2 系統主板與傳感模塊
關于電源,系統采用12V鋰電池供電,采用三端正電壓調節器調節電壓。內部集成功率保護。輸出電流可以達到1A。輸入耐壓可以到達30V。提供充電接口,通過開關進行控制,電路板上留有接口,可以對鋰電池進行充電。
定位裝置采用射頻技術(RFID)。RFID已經成為一個熱門的技術。最近沃爾瑪通過了一項要求其前100家供應商在2005年1月之前向其配送中心發送貨盤和包裝箱時使用RFID技術,2006年后逐步在單件商品中使用這項技術的決議。從信息傳遞的基本原理來說,射頻識別技術在低頻段基于變壓器耦合模型(初級與次級之間的能量傳遞及信號傳遞),在高頻段基于雷達探測目標的空間耦合模型(雷達發射電磁波信號碰到目標后攜帶目標信息返回雷達接收機)。最基本的RFID系統由三部分組成:標簽、閱讀器、天線。按作用距離可分為密耦合卡(作用距離小于1厘米)、近耦合卡(作用距離小于15厘米)、疏耦合卡(作用距離約1米)和遠距離卡(作用距離從1米到10米,甚至更遠)。本系統采用近耦合卡。射頻模塊與2812的SCIA口進行通訊。通過對數據流進行解碼,判斷機器人的位置。
接著是紅外避障模塊。一般機器人的避障可以采用紅外反射的方法,這在機器人比賽中比較普遍。GPIO控制紅外線的發射,然后如果遇到障礙物會反射回來,接收管子收到光線后引起電阻變化,檢測其電阻變化就可以判斷是否有障礙物了。但是這種方法容易受到光噪聲的干擾。所以距離比較近,一般只能達到2-3cm。本人在多次比賽中,經過查資料和研究,提出了一種使用標準高頻信號38KHZ的紅外線進行障礙的探測的電路。因為使用高頻信號和高頻運放,有了一定的抗干擾能力,同時探測的距離的最大提高到8cm。首先,通過555發射紅外線。接著,信號通過紅外接收管后經過隔直電容,送入高頻運放LM318N,如圖4。然后,經過50倍的放大。如圖5和圖6。
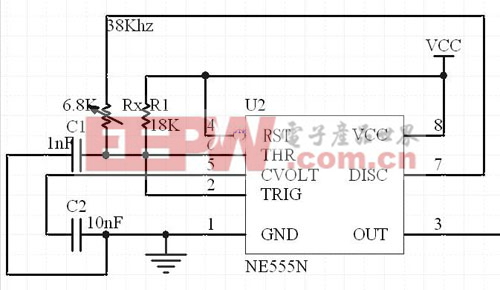
圖 1 555發射電路
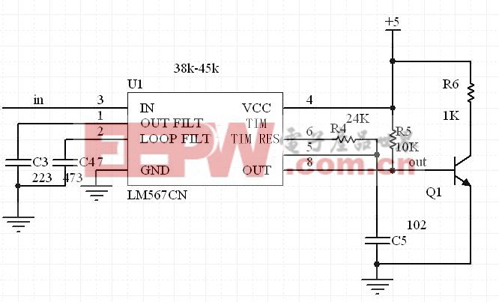
圖 2 頻率識別電路
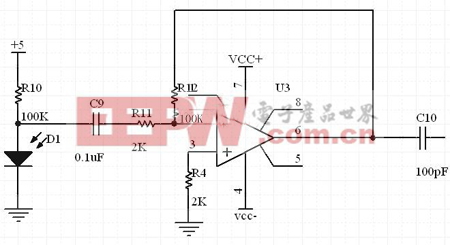
圖 3 檢測放大電路
LM567是鎖相環電路, 8腳雙列直插封裝。第5、6腳外接的電阻和電容決定了內部壓控振蕩器的中心頻率。1、2腳通常分別通過一個電容器接地,產生輸出濾波網絡和環路單級低通濾波網絡。2腳接的電容決定鎖相環路的捕捉帶寬:電容值越大,環路帶寬越窄。壓控振蕩器的中心頻率和濾波帶寬可由式子3和式子4決定。
 (3)
(3)
 (4) (其中Vi為輸入電壓)
(4) (其中Vi為輸入電壓)










評論