基于DSRC的車載通信平臺設計

● 通用性
車間通信系統分為路邊單元和車載單元兩部分,不同廠商的設備需要進行互聯,所以在硬件設計和軟件協議上需要考慮設備之間的兼容。
車載硬件平臺系統如圖5所示。無線收發模塊會發送或者接收車-車或車-路通信的數據包,通過車載處理器處理后將安全或者非安全信息顯示于用戶界面上,如果是安全消息則還會觸發音頻警報向駕駛員預警。此外,GPS單元將獲得的地理位置信息由車載處理器生成安全消息通過無線收發模塊發送給鄰近車輛。
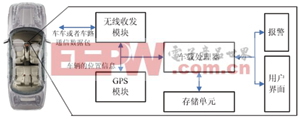
圖5 車載硬件平臺總體框架圖
無線收發模塊負責按照相應的數據格式接收和發送數據,其結構如圖6所示。整體上無線收發模塊由兩部分組成:射頻處理單元以及基帶/MAC處理單元。GPS模塊通過串口按一定的格式輸出當前車輛的經度、緯度以及差分后的速度信息,車載處理器將會對從無線收發模塊和GPS模塊接收到的當前車輛的位置和速度信息進行處理和預測,判斷是否會發生碰撞危險。
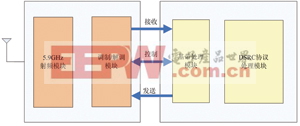
圖6 無線收發模塊結構圖
車載處理器選擇具有較高數據處理能力以及較低功耗的PXA270,PXA270處理器是基于Intel XScale架構的處理芯片,集成了存儲單元控制器、時鐘和電源控制器、DMA控制器、LCD控制器、AC97控制器等外圍控制器,可以實現豐富的外圍接口功能。PXA270采用ARM內核,內置了Intel的無線MMX技術,能夠顯著地提升處理性能,適用于車載信息處理。圖7為車載處理器結構圖,存儲芯片采用兩片型號為HYB25L256160AF的64MB SDRAM和一片型號為K9F5608U0B-YCB0的32MB Flash。
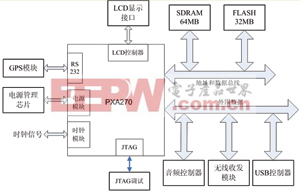
圖7 車載處理器結構圖
對于車載單元而言,一個可裁剪、低資源占用、低功耗并同時滿足實時性和多任務同時處理的需求的操作系統是必需的。在眾多的操作系統中,嵌入式Linux操作系統是比較合適的選擇。
圖8提供了車載單元的軟件設計整體架構,共分為五個模塊:視頻傳輸模塊、數據傳輸模塊、數據融合處理模塊、GPS信息獲取模塊以及用戶界面模塊。

圖8 DSRC車載單元的軟件架構
GPS信息獲取模塊通過串口接收來自GPS模塊的數據,用戶界面模塊用于顯示車輛當前狀態信息,如果需要,則通過音頻報警,提示駕駛員注意當前狀況。
視頻和數據傳輸模塊用于接收和發送數據包,接收到的數據包首先判斷數據包的類型,如果是視頻數據則將其拼接成一個完整的壓縮幀,如果是非視頻數據則將數據解包后直接交付數據處理模塊進行處理。OBU通過數據包中的時間戳判斷數據包是否過期,通過數據包中的順序號判斷視頻數據是否發生丟包。視頻傳輸中,將攝像頭采集的數據通過MP4壓縮再按照1024字節的大小進行傳輸,接收端如發生數據包的丟失則相應的丟棄一幀的數據。

數據處理模塊的作用為融合GPS信息獲取模塊、數據傳輸模塊以及視頻傳輸模塊所獲得的數據信息并根據本車的信息和周圍車輛的位置信息,及時發出報警。其使用Xvid開源編解碼函數庫對接收到的視頻數據進行MP4解碼,并顯示解碼后的圖像。表1為車間通信實驗平臺的總體性能指標。






評論