超寬帶無線視頻監控系統的設計與實現

5 UWB 接收端設計本文引用地址:http://www.104case.com/article/156929.htm
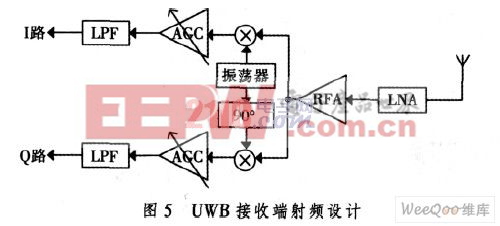
5.1 UWB 射頻接收端設計
UWB 接收端承擔著對抗多徑衰落的重要任務,因此其設計復雜度比發送端高很多。UWB 接收端也包括射頻接收與基帶接收兩部分。在射頻接收部分(見圖5),使用零中頻正交解調的方式處理射頻信號。射頻信號經低噪放大器(LNA)與射頻放大器(RFA)實現低噪聲放大,再經正交混頻,產生I,Q 信號,供基帶載波恢復使用。自動增益控制放大器(AGC) 將混頻后的信號幅度調整至適合ADC滿幅工作的狀態,低通濾波器(LPF)濾除高頻分量后,信號被送至基帶接收部分處理。
5.2 UWB 基帶接收端設計
UWB 接收端的基帶處理部分如圖6 所示, 使用了RAKE 加DFE 信道均衡的方式, 對抗多徑衰落。經過ADC 采樣的數據要首先經過匹配濾波。由于發送端使用了根升余弦濾波器進行波形成型,所以如果信道為加性高斯白噪聲(AWGN)信道,接收端匹配濾波器應具有匹配的脈沖響應,才可達到最小錯誤概率接收。但由于系統工作的信道環境不是AWGN 信道, 信道模型十分復雜,所以最優匹配濾波器的設計難以實現。實際應用時,使用了方波進行匹配,這樣既節省了乘法器,又不會導致性能的顯著惡化。
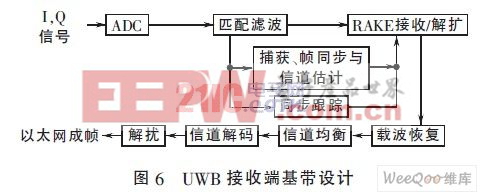
前導捕獲、幀同步、信道估計以及同步跟蹤都是基于PN 序列的自相關性質進行的。PN 序列具有尖銳的自相關峰,當2 個相同的PN 序列相位完全相同時,自相關運算的結果會產生一個峰值,而相位不同時,自相關運算結果卻很小。捕獲模塊依靠本地PN 與前導序列的相關運算結果來判斷是否有幀到達;信道估計通過檢測前導序列中的多個相關峰, 得出每一條徑的位置, 以便RAKE 接收處理;幀同步利用信道估計的結果,對幀頭序列做相關檢測; 同步跟蹤利用跟蹤序列的相關檢測結果,調整定時偏差。
RAKE 接收機的作用是完成多徑信號的能量收集與信號合并。根據信道估計的結果,在接收數據中尋找每一條徑的位置,對各條徑做相關解調,并對結果進行合并處理。RAKE 接收機的算法種類有很多,出于可實現性與性能的綜合考慮, 設計采用了PRAKE 加最大比合并的RAKE 算法。
RAKE 接收后的載波恢復使用了經典的科斯塔斯(Costas)環完成,判決反饋均衡器(DFE)使用了基于LMS算法的自適應均衡器。通常情況下,載波恢復模塊需要放在均衡器之后,但這樣需要進行復數均衡,硬件實現開銷較大。對于BPSK 調制來說,將載波恢復置于均衡器之前,可以使均衡器的抽頭系數全部為實數,減小了硬件規模。
基帶處理最后的步驟是與發送端對稱的信道解碼與解擾。經過基帶處理的信號被送往以太網成幀模塊,實現最后的視頻解碼與顯示。
6 以太網成幀與視頻顯示軟件設計
經過UWB 無線傳輸后, 以太網成幀模塊需要將接收到的應用層幀完整而透明地傳輸到PC 平臺。該成幀模塊僅使用符合以太網MAC 格式的幀單向傳輸數據,并不運行任何以太網MAC 協議。
常見的100 Mbit/s 以太網可以提供12.5 Mbit/s 的傳輸速率,比物理層接口的速率要高。在以太網成幀模塊前加入緩存,考慮到必要的開銷,緩存大小比最大以太網幀大10%左右即可保證緩存不會溢出。
在PC 平臺,使用基于Windows 操作系統的WinPcap和OpenCV 軟件開發包實現視頻解碼與顯示。WinPcap是一套以太網軟件開發包,提供全面的以太網幀收發、解析功能。OpenCV 提供了強大的視頻解碼和播放功能。
使用WinPcap 和OpenCV, 大大簡化了視頻解碼播放軟件的開發難度。而任意一臺安裝了這兩種軟件包的WindowsPC 均可以運行程序,也增強了程序的可移植性。













評論