圖6 不同布站半徑時的GDOP曲線(z=500m) 2.目標速度測量
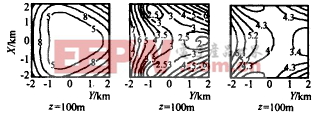
(1)目標速度估計期望值 分析圖7圖8給出的目標速度期望值與高度及布站半徑的關系可以看出,由于式(23)的非線性關系,估計目標速度時也會產(chǎn)生偏移量,此偏移量的大小隨目標高度的增加而減小.同時當系統(tǒng)布站半徑增大時,偏移量先是減小隨后又增大.在L=2km時,效果最好.
(2)目標速度估計均方根誤差 速度估計均方根誤差分析結果如圖9圖10,可以看出,目標越高速度均方根誤差越小,而L增大時中心區(qū)域的速度均方根誤差也增加. |
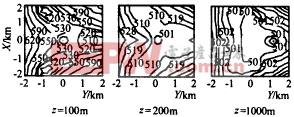
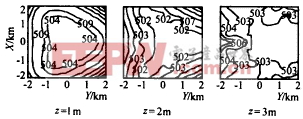
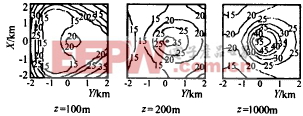
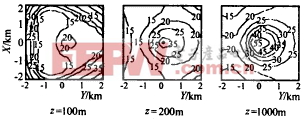
圖10 速度均方誤差與布站半徑的關系(z=500m) (3)定位誤差對速度測量的影響 分析表明,高精度定位情況下定位誤差對速度測量的影響很小.目標定位誤差引起的速度估計偏移量及均方根誤差遠小于因單站雷達多卜勒測速誤差產(chǎn)生的測速偏移量及均方根誤差,一般可以忽略.但是,當定位誤差增大時,其對速度測量的影響會迅速增大,這時定位誤差的影響就不能忽略了.
3.細柱狀目標長度
細柱狀目標長度估計的分析結果如圖11,12所示,可以看出,z越大偏移量越小,L增大時偏移量先是減小接著又增大,變化關系不是單調(diào)的,L=2km時性能最好.目標長度均方根誤差與高度及布站半徑的關系也有相同的變化規(guī)律. |
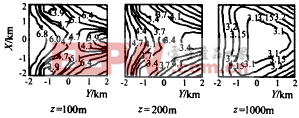
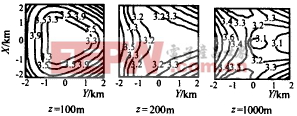
圖12 目標長度期望值分布(L=2km) 另外,按第六節(jié)的方法分析定位誤差對目標長度估計的影響,結果表明高精度定位情況下,定位誤差對目標長度估計的影響也可以忽略不計.如果不是高精度定位,只需要考慮定位誤差的影響. 十、結 論
本文將FMCW波形和單頻脈沖波形引入多站雷達系統(tǒng),在考慮時延和頻移解耦,選擇合適發(fā)射波形的基礎上,就近程應用情況下TR-R2系統(tǒng)對目標幾何中心定位,目標速度測量及細柱狀目標長度估計等問題進行了全面的分析與仿真.得出了一些對工程實踐有一定指導意義的結論.特別是文中所討論的解耦方法具有普遍適用的意義.
對系統(tǒng)性能所進行的分析表明,系統(tǒng)性能既與目標位置有關,又與系統(tǒng)布局的幾何參數(shù)有關.
由于存在非線性關系,多站系統(tǒng)在對目標進行定位,測量目標速度及估計目標長度時都會產(chǎn)生偏移量.當目標高度較低時偏移量較大,目標較高時偏移量較小.另外,目標定位誤差的GDOP因子,速度以及目標長度估計均方根誤差也都隨高度的增加而減小.
系統(tǒng)布局對性能的影響主要表現(xiàn)為系統(tǒng)布站半徑的影響.布站半徑越大,定位坐標偏移量越小,目標速度及長度偏移量隨布站半徑的變化不是單調(diào)的,GDOP因子的變化也不是單調(diào)的,在本文分析的情況下,L=2km時系統(tǒng)性能最好.
高精度定位情況下,定位誤差對目標長度及速度測量的影響很小,可以忽略不計. |







評論