開(kāi)關(guān)電源(Buck電路)的小信號(hào)模型及環(huán)路設(shè)計(jì)

摘要:建立了Buck電路在連續(xù)電流模式下的小信號(hào)數(shù)學(xué)模型,并根據(jù)穩(wěn)定性原則分析了電壓模式和電流模式控制下的環(huán)路設(shè)計(jì)問(wèn)題。
本文引用地址:http://www.104case.com/article/156669.htm關(guān)鍵詞:開(kāi)關(guān)電源;小信號(hào)模型;電壓模式控制;電流模式控制
0 引言
設(shè)計(jì)一個(gè)具有良好動(dòng)態(tài)和靜態(tài)性能的開(kāi)關(guān)電源時(shí),控制環(huán)路的設(shè)計(jì)是很重要的一個(gè)部分。而環(huán)路的設(shè)計(jì)與主電路的拓?fù)浜蛥?shù)有極大關(guān)系。為了進(jìn)行穩(wěn)定性分析,有必要建立開(kāi)關(guān)電源完整的小信號(hào)數(shù)學(xué)模型。在頻域模型下,波特圖提供了一種簡(jiǎn)單方便的工程分析方法,可用來(lái)進(jìn)行環(huán)路增益的計(jì)算和穩(wěn)定性分析。由于開(kāi)關(guān)電源本質(zhì)上是一個(gè)非線性的控制對(duì)象,因此,用解析的辦法建模只能近似建立其在穩(wěn)態(tài)時(shí)的小信號(hào)擾動(dòng)模型,而用該模型來(lái)解釋大范圍的擾動(dòng)(例如啟動(dòng)過(guò)程和負(fù)載劇烈變化過(guò)程)并不完全準(zhǔn)確。好在開(kāi)關(guān)電源一般工作在穩(wěn)態(tài),實(shí)踐表明,依據(jù)小信號(hào)擾動(dòng)模型設(shè)計(jì)出的控制電路,配合軟啟動(dòng)電路、限流電路、鉗位電路和其他輔助部分后,完全能使開(kāi)關(guān)電源的性能滿足要求。開(kāi)關(guān)電源一般采用Buck電路,工作在定頻PWM控制方式,本文以此為基礎(chǔ)進(jìn)行分析。采用其他拓?fù)涞拈_(kāi)關(guān)電源分析方法類(lèi)似。
1 Buck電路電感電流連續(xù)時(shí)的小信號(hào)模型
圖1為典型的Buck電路,為了簡(jiǎn)化分析,假定功率開(kāi)關(guān)管S和D1為理想開(kāi)關(guān),濾波電感L為理想電感(電阻為0),電路工作在連續(xù)電流模式(CCM)下。Re為濾波電容C的等效串聯(lián)電阻,Ro為負(fù)載電阻。各狀態(tài)變量的正方向定義如圖1中所示。
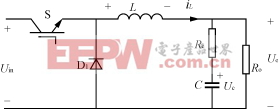
圖1 典型Buck電路
S導(dǎo)通時(shí),對(duì)電感列狀態(tài)方程有
L![]() =Uin- Uo (1)
=Uin- Uo (1)
S斷開(kāi),D1續(xù)流導(dǎo)通時(shí),狀態(tài)方程變?yōu)?
L![]() =-Uo (2)
=-Uo (2)
占空比為D時(shí),一個(gè)開(kāi)關(guān)周期過(guò)程中,式(1)及式(2)分別持續(xù)了DTs和(1-D)Ts的時(shí)間(Ts為開(kāi)關(guān)周期),因此,一個(gè)周期內(nèi)電感的平均狀態(tài)方程為
L![]() =D(Uin-Uo)+(1-D)(-Uo)=DUin-Uo (3)
=D(Uin-Uo)+(1-D)(-Uo)=DUin-Uo (3)
穩(wěn)態(tài)時(shí),![]() =0,則DUin=Uo。這說(shuō)明穩(wěn)態(tài)時(shí)輸出電壓是一個(gè)常數(shù),其大小與占空比D和輸入電壓Uin成正比。
=0,則DUin=Uo。這說(shuō)明穩(wěn)態(tài)時(shí)輸出電壓是一個(gè)常數(shù),其大小與占空比D和輸入電壓Uin成正比。
由于電路各狀態(tài)變量總是圍繞穩(wěn)態(tài)值波動(dòng),因此,由式(3)得
L![]() =(D+d)(Uin+
=(D+d)(Uin+![]() )-(Uo+
)-(Uo+![]() ) (4)
) (4)
式(4)由式(3)的穩(wěn)態(tài)值加小信號(hào)波動(dòng)值形成。上標(biāo)為波浪符的量為波動(dòng)量,d為D的波動(dòng)量。式(4)減式(3)并略去了兩個(gè)波動(dòng)量的乘積項(xiàng)得
L![]() =D
=D![]() +dUin-
+dUin-![]() (5)
(5)
由圖1,又有
iL=C![]() +
+![]() (6)
(6)
Uo=Uc+ReC![]() (7)
(7)
式(6)及式(7)不論電路工作在哪種狀態(tài)均成立。由式(6)及式(7)可得
iL+ReC![]() =
=![]() (Uo+CRo
(Uo+CRo![]() ) (8)
) (8)
式(8)的推導(dǎo)中假設(shè)ReRo。由于穩(wěn)態(tài)時(shí)![]() =0,
=0,![]() =0,由式(8)得穩(wěn)態(tài)方程為iL=Uo/Ro。
=0,由式(8)得穩(wěn)態(tài)方程為iL=Uo/Ro。
這說(shuō)明穩(wěn)態(tài)時(shí)電感電流平均值全部流過(guò)負(fù)載。對(duì)式(8)中各變量附加小信號(hào)波動(dòng)量得
iL+![]() +ReC
+ReC![]() =
=![]() 〔Uo+
〔Uo+![]() +CRo
+CRo![]() 〕(9)
〕(9)
式(9)減式(8)得
![]() +ReC
+ReC![]() =
=![]() (
(![]() +CRo
+CRo![]() )(10)
)(10)
將式(10)進(jìn)行拉氏變換得
![]() (s)=
(s)=![]() (11)
(11)
一般認(rèn)為在開(kāi)關(guān)頻率的頻帶范圍內(nèi)輸入電壓是恒定的,即可假設(shè)![]() =0并將其代入式(5),將式(5)進(jìn)行拉氏變換得
=0并將其代入式(5),將式(5)進(jìn)行拉氏變換得
sL![]() (s)=d(s)Uin-
(s)=d(s)Uin-![]() (s) (12)
(s) (12)
由式(11),式(12)得
![]() =Uin
=Uin![]() (13)
(13)
![]() =
=![]() ·
·![]() (14)
(14)
式(13),式(14)便為Buck電路在電感電流連續(xù)時(shí)的控制-輸出小信號(hào)傳遞函數(shù)。
2 電壓模式控制(VMC)
電壓模式控制方法僅采用單電壓環(huán)進(jìn)行校正,比較簡(jiǎn)單,容易實(shí)現(xiàn),可以滿足大多數(shù)情況下的性能要求,如圖2所示。
圖2中,當(dāng)電壓誤差放大器(E/A)增益較低、帶寬很窄時(shí),Vc波形近似直流電平,并有
D=Vc/Vs(15)
d=![]() /Vs(16)
/Vs(16)
式(16)為式(15)的小信號(hào)波動(dòng)方程。整個(gè)電路的環(huán)路結(jié)構(gòu)如圖3所示。
圖3沒(méi)有考慮輸入電壓的變化,即假設(shè)![]() =0。圖3中,
=0。圖3中,![]() (一般為0)及
(一般為0)及![]() 分別為電壓給定與電壓輸出的小信號(hào)波動(dòng);KFB=UREF/Uo,為反饋系數(shù);誤差e為輸出采樣值偏離穩(wěn)態(tài)點(diǎn)的波動(dòng)值,經(jīng)電壓誤差放大器KEA放大后,得
分別為電壓給定與電壓輸出的小信號(hào)波動(dòng);KFB=UREF/Uo,為反饋系數(shù);誤差e為輸出采樣值偏離穩(wěn)態(tài)點(diǎn)的波動(dòng)值,經(jīng)電壓誤差放大器KEA放大后,得![]() ;KMOD為脈沖寬度調(diào)制器增益,KMOD=d/
;KMOD為脈沖寬度調(diào)制器增益,KMOD=d/![]() =1/Vs;KPWR為主電路增益,KPWR=
=1/Vs;KPWR為主電路增益,KPWR=![]() /d=Uin;KLC為輸出濾波器傳遞函數(shù),KLC=
/d=Uin;KLC為輸出濾波器傳遞函數(shù),KLC=![]() 。
。
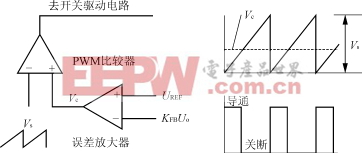
圖2 電壓模式控制示意圖和相關(guān)波形

pwm相關(guān)文章:pwm是什么





評(píng)論