基于A5191HRT和AD421的HART協議通信模塊的設計與實現

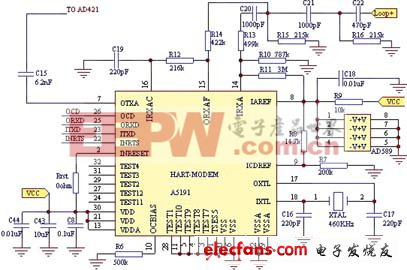
其中Loop+和Loop-分別是電流環路的兩個端口;從MCU輸入DAC的數字碼是通過三線接口實現的,分別是時鐘線CLOCK、數據線DATA和鎖存線LATCH。
HART協議通信模塊的軟件設計包括AD421的控制和HART通信協議的軟件程序設計。前者較為簡單,后者包括HART協議數據鏈路層和應用層的軟件設計,是整個模塊軟件設計的主體和關鍵。
HART協議通信模塊的通信過程首先由主機(上位機)發送命令幀發起,現場儀表作為從設備使用中斷調用子程序的方法完成接收和應答。現場儀表在上電或看門狗復位后,主程序首先對HART協議通信模塊進行初始化,例如設定UART的工作方式、串行通信波特率、數據幀格式、清通信緩沖區、開中斷等,之后將其設置為等待狀態。上位機發送命令時,A5191HRT的載波檢測輸出OCD變為低電平,觸發UART中斷,程序進入接收過程。MCU完成主機命令的接收、解釋并執行相應的操作后,按一定格式生成應答幀并送入發送緩沖區,完成發送后再次將HART協議通信模塊設置為等待狀態。圖6為HART協議通信模塊接收主機幀、回復應答幀的程序流程圖。
HART協議通信模塊通過上圖所示的中斷調用子程序的方法,完成現場儀表和主機之間的通信,可以使主機完成對現場儀表的工作參數設置、測量結果讀取、儀表檢測等工作。

結論
實踐證明,上述的HART協議通信模塊的實現方法切實可行,具有電路設計簡單、工作可靠性高的優點,具有很好的參考價值和實用性。HART技術在國外已經很成熟,并以其自身突出的優點而成為智能控制領域中應用最廣泛的現場通信協議,在今后的很長一段時期內,HART技術將在我國現場儀表的智能化改造和研制中發揮重要的作用。










評論