基于STM32F103VCT6的微位移控制系統(tǒng)設計

本文引用地址:http://www.104case.com/article/154786.htm
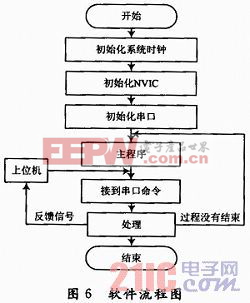
2.3 串口通信協(xié)議的編寫
上位機與下位機通信采用串口通信,波特率為9 600 b/s、8位數(shù)據(jù)、一個停止位、無校驗、無流量控制、接收發(fā)使能。
上位機與下位機之間的控制命令采用9個字節(jié)每幀,包括電機選擇、命令、數(shù)據(jù)、校驗等。
3 實驗
在微位移系統(tǒng)測量實驗過程中,采用步進電機步進角為1.8°;步進電機驅動器為8細分;定位機構滾珠絲杠導程為4 mm;光柵傳感器分辨率為1μm。理論上每發(fā)一個脈沖絲杠移動2.5μm。發(fā)送為20 000個脈沖,脈沖頻率2 000 Hz。理論上光柵傳感器產生50 000個脈沖。控制系統(tǒng)對反饋信號進行計數(shù),并發(fā)送偏差命令進行實時修正直到最后達到預定位置。同時也進行了速度調節(jié)實驗,步進電機運行平穩(wěn),驗證了系統(tǒng)的可靠性。
4 結論
基于STM32F103VCT6單片機的微位移控制系統(tǒng)實現(xiàn)了對上位機命令的響應、處理及數(shù)據(jù)交互。通過接收上位機發(fā)送的各種命令,STM32F 103VCT6單片機控制系統(tǒng)產生相應的控制信號,并通過步進電機帶動滾珠絲杠完成規(guī)定的動作。同時通過處理位置反饋信號來判斷運動是否到位,使三維微位移系統(tǒng)的運動精度大大提高。而且步進電機采用升、降速控制,避免了步進電機的直接啟動與急停,大大地改善了步進電機運動的平穩(wěn)性,而且輸出脈沖頻率可以在20 kHz以內調節(jié),具有很寬的速度范圍,具有很強的適應性。整體上滿足了微位移控制系統(tǒng)的要求。













評論