射頻識(shí)別技術(shù)的車輛主動(dòng)定位方法

按車道寬度為3.5 m分析汁算,車輛在雙向4、6、8和10車道道路中各個(gè)車道的定位誤差情況如圖6、圖7所示。本文引用地址:http://www.104case.com/article/154105.htm
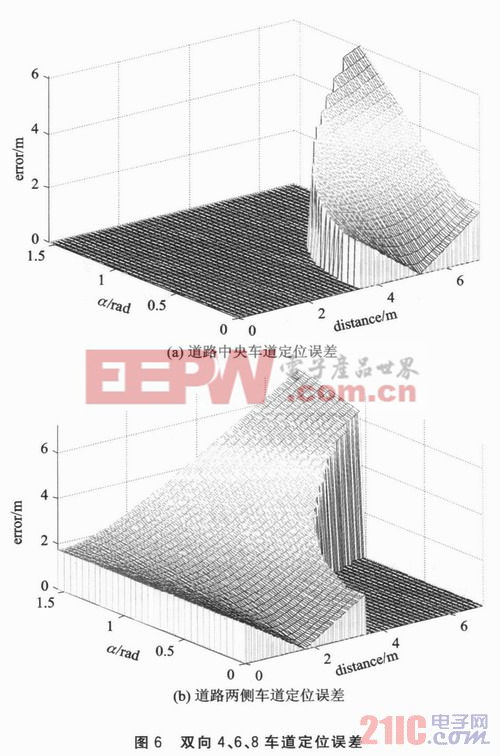
車載RFID主動(dòng)定位方法中車輛在道路的不同位置的定位誤差情況如圖6、圖7所示。圖6(a)為雙向6車道道路的第2車道和雙向8車道道路的第2、3車道的定位誤差,(b)為雙向4、6、8、車道道路的其余車道的定位誤差。圖7為雙向10車道道路各車道的定位誤差,第1車道和第5車道及第2車道和第4車道的定位誤差相同。
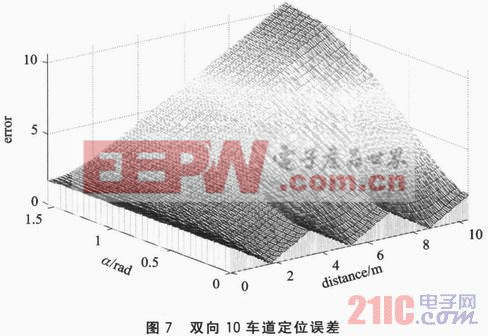
由圖6、圖7分析得到,對(duì)于所有車道,越靠近路肩和中央隔離帶的車道上的車輛平均定位誤差越大,在同一車道上,越靠近車道中央行駛的車輛定位誤差越小。
結(jié)語
根據(jù)實(shí)際淵查統(tǒng)計(jì)的數(shù)據(jù)發(fā)現(xiàn),車輛在一條道路上不同車道的分布和車輛在同一車道上的位置分布服從高斯分布。因此本論文提出的基于RFID車輛主動(dòng)定位方法對(duì)實(shí)際行駛過程中的車輛具有較高的定位精度,并可以將車輛定位到具體車道,車輛的具體車道位置信息對(duì)智能交通中車輛防碰撞的研究具有重要意義。RFID可以與其他定位技術(shù)結(jié)合,組成新的組合定位導(dǎo)航系統(tǒng)。車載RFID的年輛主動(dòng)定何擺脫了傳統(tǒng)定化對(duì)GPS定位系統(tǒng)的依賴,不會(huì)因?yàn)樾盘?hào)丟失導(dǎo)致無法定位或定位不準(zhǔn)確。鑒于RFID具有信息處理精確度高、速度快,使用不受環(huán)境因素影響,成本低,可以重復(fù)利用多次讀寫等諸多優(yōu)點(diǎn),RFID技術(shù)將在智能交通領(lǐng)域得到廣泛應(yīng)用。






評(píng)論