射頻識別技術的車輛主動定位方法

摘要:傳統的車輛定位方法只能獲得車輛的具體坐標信息,無法確定車輛位于道路的第幾車道。本文提出基于射頻識別技術對車輛進行主動定位的定位方法。該方法將RFID閱讀器的3組天線的閱讀距離設計為特定值,根據閱讀器3組天線是否讀到標簽的不同情況,判定車輛位于第幾車道,進而計算出車輛的位置。通過對該方法進行誤差分析,結果證明該方法能夠完成對車輛在具體車道上的主動定位。
關鍵詞:射頻識別技術;車輛主動定位;車道
引言
智能交通在執行控制命令、完成預定任務時首先要解決定位問題。目前已經有多種解決辦法,主要包括:
①航位推算法(DR)。它利用表征方向和速度的矢量,根據車輛在某一時刻的位置推算出另一時刻位置的導航方法。該方法有累積誤差,在估計車輛方向角時誤差會逐漸趨向無窮大。
②全球定位系統(GPS)。它容易因建筑物、樹木等阻擋,使得在不少街道、高架橋、立交橋等處的信號強度不夠甚至丟失,而導致定位誤差較大甚至錯誤定位,并且因其成本等原因限制了其在車輛定位中的應用。
③地圖匹配它是一種基于軟件技術的定位誤差修正方法,其基本思想是將車輛定位信息與數字地圖中的道路網信息聯系起來,車輛在行駛過程中不斷比較,由此確定車輛在地圖中的位置。此方法要求建立高精度的數字地面模型。
本文提出了一種基于RFID技術的車輛定位方法。與其他傳統定位方法比較,用RFID技術定位的主要優勢有:
①可以準確定位到車道,而傳統的各種定位方法都還無法實現具體車道的定位。
②傳統的定位方法在高架橋和橋梁上會存在定位層出錯的問題,例如行駛在橋上的車輛被定位到河里,高架橋第二層錯定位為第一層,RFID定位技術解決了這一問題。
1 車載RFID主動定位方法
1.1 RFID工作原理
RFID(Radio Frequency Identification,射頻識別)是一種非接觸式的自動識別技術,可識別高速運動物體,并可同時識別多個電子標簽。按工作頻率的不同分為低頻(LF)、高頻(HF)、超高頻(UHF)、微波(MW)。RFID是一種簡單的無線系統,該系統由閱讀器和標簽組成。
閱讀器是對RFID標簽進行讀/寫操作的設備,主要包括射頻模塊和數字信號處理單元曲部分。閱讀器是RFID系統中最重要的基礎設施,一方面,RFID標簽返回的微弱電磁信號通過天線進入閱讀器的射頻模塊中轉換為數字信號,再經過閱讀器的數字信號處理單元對其進行必要的加工整形,最后從中解調出返回的信息,完成對RFID標簽的識別或讀/寫操作;另一方面,上層中間件及應用軟件與閱讀器進行交互,實現操作指令的執行和數據匯總上傳。電子標簽中存儲著需要被識別的位置信息,被安裝在路面,其存儲的信息可以被閱讀器通過非接觸方式讀/寫。
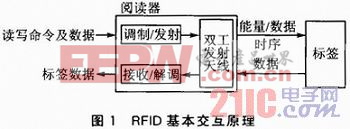
RFID的基本交互原理如圖1所示。工作流程如下:
①閱讀器通過發射天線發送一定頻率的射頻信號,當標簽進入發射天線工作區域時會產生感應電流,從而獲得能量被激活;
②標簽將自身編碼等信息通過其內置發射天線發送出去;
③系統接收天線接收到從標簽發送來的載波信號,經天線調節器傳送到閱瀆器,閱讀器對接收到的信號進行解調解碼然后送到后臺主系統進行相關處理;
④主系統進行邏輯運算判斷該卡的合法性,然后針對不同的設定做出相應的處理和控制,發出指令信號,控制執行機構執行相應動作。
標簽與閱讀器之間的耦合方式采用遠距離系統,即利用輻射遠場區的電磁耦合(電磁波的發射與反射)構成射頻通道。這種耦合方式的作用區域范同為1~10 m,適用于高速移動物體遠距離識別,此系統也是目前發展最快的RFID系統。
1.2 閱讀器及標簽的部署方法
國內最寬的公路為2011年投入運營的深圳水官雙向10車道高速公路。本論文將針對雙向4、6、8、10車道的情況進行討論,介紹車載RFID主動定位的定位方法。
與電子不停車收費系統中閱讀器和標簽的安裝不同,在車載RFID主動定位方法中,閱讀器安裝在車輛上,標簽安裝在路邊和公路的中央隔離帶。閱讀器配有3組天線,1組全向天線,2組定向天線,通過3組天線讀取標簽中的信息。全向天線的閱讀距離設置保證了在不同車道數目的高速公路間轉換時都可以讀到兩側的標簽。標簽中或者數據庫中含有標簽的位置坐標信息和此段高速公路的車道數目N,當閱讀器讀取到標簽的信息后,會根據車道數目和讀到標簽的各種情況判斷車輛位于第幾車道。
1.3 定位車道方法
以雙向道路的一側為例,RFID標簽安裝示意圖如圖2所示。車輛自左向右行駛,標簽以一定間距安裝于路肩和中央隔離帶。從靠近路肩的一側定義車道依次為1~5車道。設車道寬度為W,令lO為全向天線的閱讀距離,lD1為車輛右側定向天線的閱讀距離,lD2為車輛左側定向天線的閱讀距離。其中lD1=lD2=W,lO=2W。







評論