基于多傳感器數據融合的智能機器人設計

3 硬件結構
為減輕主控器的負擔,系統采用主從式控制系統。分別用三個MCS-96單片機處理來自測距傳感器、超聲傳感器、尋找目標傳感器的數據,并進行數據融合;最后把處理好的數據通過RS-232串口上傳至上位機PC/104 386SX系統。由PC/104主機做出下一步的處理。系統硬件結構框圖如圖1所示。
PC/104主機主要用來完成對三個下位機所處理的數據進行采集,然后根據情況調整小車前向電機、轉向電機的運動,并將光電編碼器測量到的小車速度等信息顯示在液晶屏幕上,如果發生碰撞現象,還可用語音進行報警等操作。上位機選用PC/104主機是因為:第一,386系統處理速度比單片機要迅速;第二,為了便于以后系統的擴展。
為避免其它不可預知的故障出現,使機器不能正常運行,系統還設置了一個硬復位按鈕。
各個下位機的軟件設計流程是先檢測各類傳感器的數據,再用D-S法進行數據融合,最后等待主機的指令,把融合后的數據上傳至主機。
主機的軟件設計流程是通過串口循環接收來自三個不同下位機的數據(三個下位機的通訊握手地址不同)。根據尋找目標傳感器所測到的目標位置,進行路徑規劃,調整前向電機與轉向電機的運動方向。再根據測距傳感器所測到的目標距離,調整電機的運動速度。當避障傳感器發現前方有障礙物或小車與障礙物發生碰撞時,要立即停止運行,重新規劃路徑。讀取光電編碼器的值,把小車速度顯示在液晶顯示器上。如果出現小車與障礙物發生碰撞或找不到目標光源物體時要通過語音芯片進行報警。
主機和下位機程序內部均設有看門狗程序,避免程序跑飛。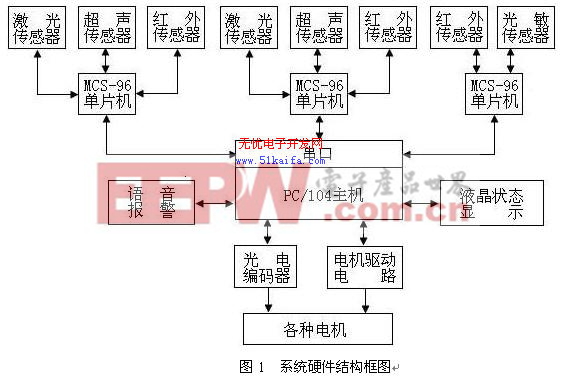
5 總結
本系統設計了一個基于多傳感器數據融合技術的智能機器人。該設計運用了多傳感器數據融合技術,采用了主從式控制系統,使機器人能夠更準確的尋找目標與避障,有很好的魯棒性。
本文作者創新點:(1)提出一種基于多傳感器數據融合技術的智能機器人系統設計,軟硬件工作可靠。(2)用到D-S融合算法,提供與環境有關的關于系統狀態的足夠的與可靠的信息,使機器人能夠自主規劃路徑、躲避障礙物,最終向目標靠近。(3)系統采用了主從式控制系統,有很好的擴展性。(4)良好的抗干擾能力。










評論