基于ARM 的漿果采摘機械手運動控制研究

2.3 反饋模塊設計
本系統的電機使用光電編碼器進行測速。光電編碼器具有低慣量、低噪聲、高分辨率和高精度等特點,適合于控制直流電機。將編碼器產生的脈沖信號經變換得到電動機速度用于速度反饋形成速度閉環,同時可以對脈沖信號進行計數和運算,從而得到采摘機器手的位置和速度。
3 控制系統軟件設計
控制系統中控制任務的實現由應用程序來完成,應用程序設計的好壞將直接決定整個系統的控制質量和控制效率。為了更好地進行系統調試以及功能擴展,控制系統軟件也采用了模塊化結構設計。系統主程序主要分為初始化模塊和運行模塊兩大部分。
3.1 初始化模塊
初始化模塊需要完成的工作是:異常向量表定義、堆棧初始化、系統變量初始化、中斷系統初始化、I/O 初始化和外圍初始化等操作。
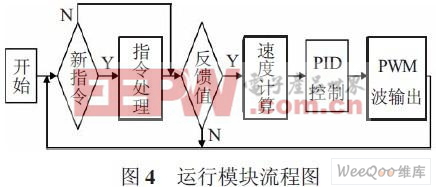
3.2 運行模塊
運行模塊通過中斷形式進行,包括測速模塊、PID控制模塊和PWM 波輸出模塊。主要工作流程為:首先判斷是否有新的速度指令,若有,則判斷出速度大小和方向,并將其轉換成程序中規定的統一形式,以方便進行PID 控制;然后判斷是否有新的傳感器反饋值,若有,則計算出電機的速度大小,并執行電機的PID 控制程序,接著調用電機驅動程序,改變PWM 占空比,輸出PWM 波,實現電機的速度控制。測速模塊每隔一定采樣時間對光電編碼器脈沖進行采樣,以得到速度反饋值,運行模塊的主要流程如圖4 所示。
4 結束語
基于ARM 的運動控制系統是漿果采摘機器人系統的一個重要組成部分。ARM 微處理器性能好、功耗低、體積小、移植性較好。以ARM 微處理器為核心的運動控制系統可以通過硬件平臺的改進和升級、軟件算法的再生和模塊化使整個控制系統具備可移植性,具有一定應用價值。











評論