基于ARM 的漿果采摘機械手運動控制研究

2 控制系統硬件設計
機器人控制系統一般需要滿足以下幾個基本要求。
①控制系統的小型化、輕型化和模塊化;
②控制系統的實時性;
③系統的穩定性和開放性。
為此將本控制系統設計成由主控制模塊、驅動模塊和反饋模塊三部分組成,如圖2 所示。
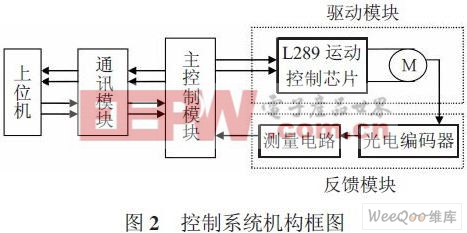
2.1 主控制模塊設計
為了能夠滿足機器人控制需求,同時兼顧機器人對控制器體積、重量、功耗等敏感特性的要求,主控制模塊采用Samsung 公司基于ARM920T 核(適用于實時環境) 的低功耗、16/32bit、高性能的RISC 微處理器S3C2410,其主頻為266MHz。操作系統則選用源碼公開、專為ARM 設計,可靠性高的實時、多任務內核arm-Linux。
要使微處理器能夠正常工作,必須對其外圍進行擴展,圖3 所示為實現整個ARM 主控制模塊的硬件系統原理圖。
電源模塊負責為整個模塊提供穩定、干凈的直流電源。JTAG 調試單元用來實現程序的在線調試。串行通信模塊則通過RS232 通訊標準實現主控制模塊與上位機的通訊。為使系統能夠運行較大的程序(如LINUX內核和文件系統),在微處理器外圍擴展了32M 字節的SDRAM 內存芯片。擴展了16M 字節的FLASH 芯片作為程序和數據的存儲設備,以保證掉電時程序和數據不會丟失。
2.2 驅動模塊設計
本機器人系統采用直流電機控制,電機驅動芯片選用ST 公司的L298。L298 是ST 公司生產的一種高電壓、大電流電機驅動芯片。該芯片的主要特點是工作電壓高,輸出電流大,瞬間峰值電流可達3A,持續工作電流為2A;內含兩個H 橋的高電壓大電流全橋式驅動器,可用來驅動直流電動機、步進電動機、繼電器和線圈等感性負載;采用標準TTL 邏輯電平信號控制;具有兩個使能控制端,在不受輸入信號影響的情況下允許或禁止器件工作;有一個邏輯電源輸入端,使內部邏輯電路部分在低電壓下工作;可外接檢測電阻,將變化量反饋給控制電路。











評論