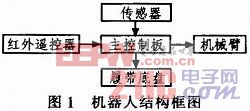
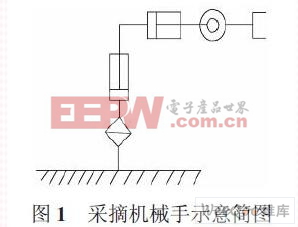
- 摘要:針對機器視覺采摘機器存在的技術不成熟,成本過高等不足,提出采用人工操控的半自動采摘技術,并進行了探索研究。設計了一款模擬采摘機器人,機器人以履帶底盤為基座,三自由度機械臂,紅外遙控操作。硬件電路
- 關鍵字:
機器人 設計 采摘 遙控 ATmega32 基于
- 基于ARM 的漿果采摘機械手運動控制研究, 隨著計算機和自動控制技術的迅速發展,農業機械將進入高度自動化和智能化時期。漿果采摘機器人的應用可以提高勞動生產率和產品質量,改善勞動條件,解決勞動力不足等問題。漿果采摘機器人主要由機械手及末端執行器
- 關鍵字:
控制 研究 運動 機械手 ARM 采摘 基于 ARM
采摘介紹
您好,目前還沒有人創建詞條采摘!
歡迎您創建該詞條,闡述對采摘的理解,并與今后在此搜索采摘的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473