基于ARM9嵌入式系統智能滅火機器人控制器設計

電源直接影響機器人運行特性。考慮到電動機啟動瞬間電流很大,會造成電源電壓不穩,影響單片機和輸入電路工作的穩定性和可靠性,因此這里采用雙電源供電方案。電機電源采用容量為2 500 mAh高放電倍率聚合物鋰電池,工作電壓為24 V,能提供40 A的穩定供電電流,是普通電池的10倍;控制器電源采用8.4 V鋰電池,并提供電壓采樣端口,以供電池檢測,控制器電源供電電路圖如圖5所示。
為獲得CPU各端口電路所需要的不同等級的電壓,該設計采用1個LM317T三端穩壓器和2個AMSlll7低壓差線性電壓調整器,并通過其附屬電路,得到精確穩定的5 V,3.3 V,1.8 V三種電壓;用1個發光二極管LD1和限流電阻R5作為電源指示燈,以顯示電源開關的狀態;為實時采樣電源電壓,防止鋰電池過放或過充,通過R1,R2分壓,引出ADl9端口作為電源采樣端口。
4 滅火機器人嵌入式系統軟件設計
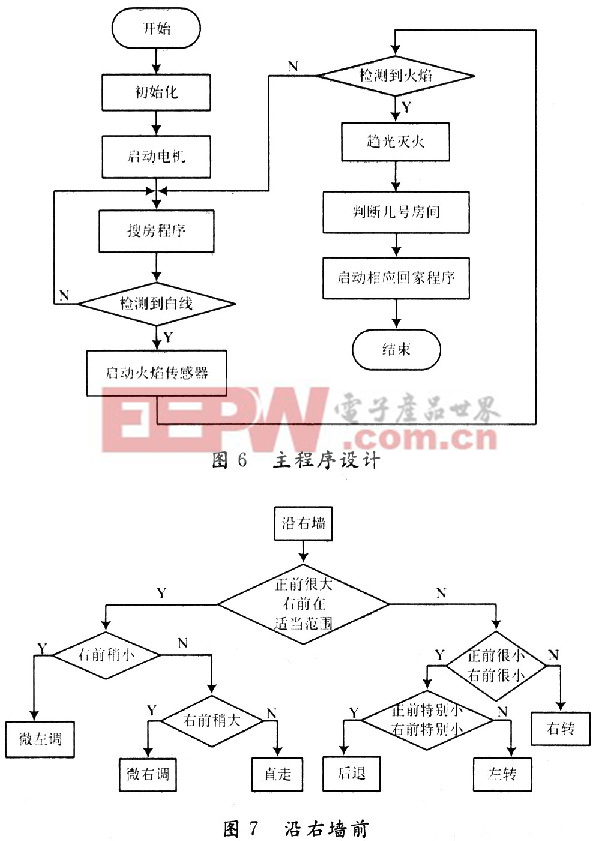
機器人控制器是一個多任務并行執行的實時控制器。在軟件實現上,滅火機器人除了要協調控制各個不同功用的電機,還需要對紅外、灰度、聲音等多種傳感器接收的數據進行傳輸、處理等。采用C語言可以方便快捷的編寫程序。這里對滅火機器人的每種功能進行模塊化處理。總體的思路是:尋找火源,確定火源方位,接近火源,趨光滅火,回家。主程序設計流程圖如圖6所示。實現起來最基本的就是使機器人能夠順利的直線行走和拐彎,這一模塊稱為沿墻走(沿左墻前,沿左墻后,沿右墻前,沿右墻后),沿右墻前如圖7所示。具體為:
(1)若正前距離很大,同時右前的距離稍小時,太靠近右墻,執行左轉微調;
(2)若正前距離很大,同時右前的距離稍大時,太靠近左墻,執行右轉微調;
(3)若正前距離很大,右前距離適中,就直行;
(4)若正前距離特別小,同時右前距離特別小時,使機器人稍后退可以防碰撞;
(5)若正前距離比較小,右前距離也比較小時,機器人左轉;
(6)右前距離很大時,機器人執行右轉彎。
其中:(1)~(3)保證了在走直線時可以走直,通過不斷調整,使機器人始終運行在距離墻10~15 cm的位置。(4)~(6)保證了機器人順利拐彎和進房間。沿左墻行走及反方向沿墻行進同理,具體的參數必須在不斷試驗中反復調節。幾種沿墻走配合使用就可以實現全部房間的遍歷和回家,再加上趨光和滅火的模塊就完成了整個滅火任務。本文引用地址:http://www.104case.com/article/151731.htm








評論