基于嵌入式ARM Linux步進電機驅動程序的設計

摘要:本平臺基于Samsung公司的友善之譬QQ2440V3開發板,它采用Samsung S3C2440為微處理器,Samsung S3C2440的內核為ARM920T,且采用Linux2.6.13內核作為它的操作系統。設計了硬件系統,并實現驅動程序對步進電機的控制,在QQ2440V3開發板上的實驗結果表明驅動運行正常、穩定。這是實現激光雕刻的核心,為以后實現傳能激光雕刻夯實了基礎。
關鍵詞:ARM;Linux;步進電機;驅動
0 引言
隨著激光雕刻機的不斷發展和改進,嵌入式Linux的激光雕刻機比CNC(Computer numerical control)激光雕刻的優勢不斷顯現,它大幅度提高了處理能力,方便了設計開發,節約了成本,是未來經濟型激光雕刻機發展的趨勢。而嵌入式ARM(Advanced RISC Machines)Linux步進電機驅動是實現激光雕刻的核心。
嵌入式開發過程中,經常需要為特定設備開發驅動程序。這些驅動程序的編寫和編譯與PC上的Linux驅動開發相比存在明顯的差異,需要考慮的因素較多,實現過程較為復雜。本文以Samsung公司的友善之譬S3C2440開發板為例,探討如何使用嵌入式Linux開發字符設備驅動程序來驅動步進電動機。
1 硬件系統設計方案
控制系統由處理器、步進電機驅動器、步進電機3部分組成,如圖1所示。

處理器用友善之譬QQ2440V3開發板,內核為ARM920T。步進電機驅動器采用北京和利時電機技術有限公司(原四通電機)的SH-20403。驅動器共有四路輸入信號:公共、脈沖信號輸入、方向信號輸入和脫機信號輸入。驅動器的輸入信號既可以采用共陽極也可以采用共陰極接線方式,使用共陽極模式時,應將輸入信號的電源正極連接到公共端,將輸入信號連接到對應的信號端子,信號低電平有效,此時對應的內部光耦導通,控制信號輸入驅動器中;對應共陰極模式時,將輸入信號的電源負極連接到公共端,信號高電平有效,我們采用的是共陽極接法。
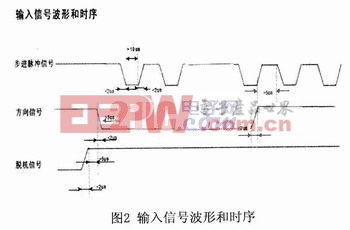
控制步進電機驅動器的時序如圖2所示。








評論