基于ARM的柴油機(jī)電子調(diào)速器研究

3.2 主控制程序
主控制流程圖如圖3所示。本文引用地址:http://www.104case.com/article/150806.htm
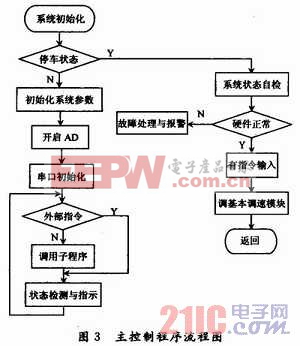
主要完成以下功能:系統(tǒng)上電或者復(fù)位后,對(duì)硬件芯片進(jìn)行初始化操作;判斷系統(tǒng)復(fù)位后的狀態(tài),如果是非停車狀態(tài),則應(yīng)該恢復(fù)正常的運(yùn)行狀態(tài),否則進(jìn)入系統(tǒng)狀態(tài)自檢測(cè);通過(guò)串口向外部設(shè)備發(fā)送系統(tǒng)的狀態(tài)信息,利于觀測(cè)系統(tǒng)的運(yùn)行狀態(tài);程序自動(dòng)查詢、判斷系統(tǒng)的外部指令,并跳轉(zhuǎn)到相應(yīng)的功能模塊完成指定的任務(wù)。
3.3 中斷服務(wù)程序
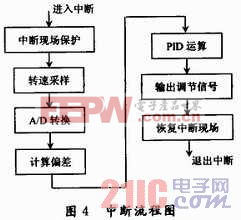
在中斷程序里,采樣轉(zhuǎn)速反饋,根據(jù)與給定轉(zhuǎn)速的偏差值,進(jìn)行PID調(diào)節(jié)運(yùn)算,根據(jù)輸出值調(diào)節(jié)給出相應(yīng)的齒條限制值。流程圖如圖4所示。
4 結(jié)語(yǔ)
本文將嵌入式系統(tǒng)應(yīng)用到船舶柴油機(jī)電子調(diào)速器的控制系統(tǒng)中,介紹了一種基于ARM的嵌入式船舶柴油機(jī)電子調(diào)速器,以LPC2129為核心的控制系統(tǒng),給出了總體控制方案和硬件設(shè)計(jì)包括傳感器部分,控制器部分,執(zhí)行器部分以及與PC機(jī)的串行通信,調(diào)節(jié)轉(zhuǎn)速采用PID控制算法。










評(píng)論