基于ARM的柴油機電子調速器研究

2.2 統硬件部分
系統硬件設計結構框圖如圖2所示,分為傳感器、控制器、執行器3個部分。本文引用地址:http://www.104case.com/article/150806.htm
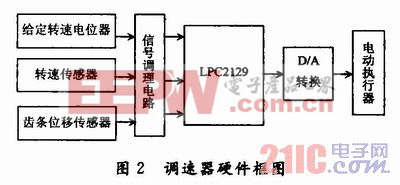
本系統的輸入信號有:柴油機實際轉速信號、由電位器給出的設定轉速信號以及齒條位移反饋信號,均經過信號調理后送入ARM。
選用磁電式轉速傳感器來測量柴油機實際轉速,得出的正弦交流信號經整形電路調理與定寬處理后轉換為方波信號,方波信號隨后經RC積分電路積分為電壓量,電壓量的大小與方波的頻率成正比,電壓量經A/D轉換為數字量送ARM。
設定轉速信號由電位器給出,其輸出信號要經過放大和A/D轉換后送ARM處理器。
齒條位移的檢測采用角位移傳感器,其輸出信號也要經過放大和A/D轉換后送ARM進行處理。
控制器主要完成調速與控制運算、系統工作狀態監測以及與外部PC機的通信聯絡等功能。是整個系統的核心部分,選擇Philips公司的LPC2129芯片。控制器由CPU、外圍輔助電路以及串行通訊控制器組成。
調速執行機構的功能是將轉速控制器輸出的油門開度調節信號轉換成油泵齒條的直線位移運動,使柴油主機的轉速與設定轉速相一致。電動執行器本質上是一個帶有內置式制動器的伺服電動機,并且安裝在高壓油泵油門齒條側,用以驅動油門齒條。同時,執行器也將齒條位移的信息反饋給控制器,供控制運算和顯示用。另外,為了便于與PC機的通信,按RS232標準擴展了串行通信接口。通用異步收發器(UART)是用硬件實現異步串行通信的通信接口電路,LPC2129內部集成了2路UART電路。在電氣特性上,RS232標準采用負邏輯方式,標準邏輯1對應-15~-5 V電壓,標準邏輯0對應+5~+15 V電壓,所以在硬件上UART的TTL電平都需要采用SIPEX的SP3232芯片進行電平轉換,才能與RS232接口連接并通信。
3 軟件設計
系統控制軟件由主控制軟件和若干個功能子程序和中斷程序構成。其中主程序完成系統硬件芯片的初始化和控制流程的管理。起動、加減速、通訊、故障處理、人機交互等控制過程由相應的子程序完成。但轉速、齒條位移等反饋信號的采集、調節等運算、調節量的輸出等實時性要求高的環節則必須采用中斷控制的方式來實現。
3.1 轉速PID調節算法及實現
調速系統中的轉速控制采用PID控制算法,由于PID控制器具有原理簡單、易于實現、適應性強、魯棒性強的優點,使其成為柴油機調速系統中應用普遍且效果良好的轉速調節方式。其算法如式(1)所示:

式中:U(t),e(t)為調節量和轉速偏差量;KP,TI,TD分別為比例增益、積分時間常數、微分時間常數。










評論