帶嵌入式MCU的8通道12位AD轉換器ADuC812及其應用

式中,Δ=αL1αR2-αR1αL2是方程組的系數行列式,如果通過分壓電路,將右端的振動量取出
經過R00和R900相敏檢波,可將右端的振動信號VR在00和900方向上進行分解,設分別為VR0和VR90,而經過L00和L900相敏檢波,可將左端的振動信號VL在00和900方向上進行分解,設分別為VL0和VL90,則左右兩端的振動的幅值分別為:
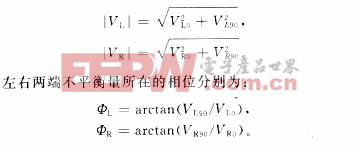
因此,相敏檢波后,得到了左右兩端兩個相位差為90°的分量,對它們進行A/D轉換后,由MCU分別計算左右兩端的幅值和相角,振動的幅值|VL|和|VR|反映了左右兩端振動的大小,通過|VL|和|VR|的計算,可解算出左右兩端不平衡量的大小,而振動的相位ΦL和ΦR反映了不平衡量所處的位置,相角的計算可求出不平衡量所在的相位,指示出重點或輕點的相位位置。
轉子的轉速由外部中斷0腳控制定時/計數器0的計時時間來實現,由8051的定時/計數器在工作方式0和方式1的結構可看出,當TCON的TR0位為1,TMOD的GATE位為1,且T0工作于定時方式時,內部振蕩信號經過12分頻后給T0提供時鐘信號,T0計數與否與外部中斷0的電平高低有關,如果INT0=0,T0不計數,如果INT0=1,T0開始計數,這樣就可測量脈沖寬度,通過光電頭將轉子的轉速轉換成脈沖信號后再2分頻,得到頻率為轉子旋轉頻率一半的方波信號,通過方波信號的高電平去控制T0的計數,該數值為轉子的旋轉周期,由轉子的旋轉周期可得到轉子的轉速大小。本文引用地址:http://www.104case.com/article/150719.htm

轉子轉速及不平衡量的計算通過外部中斷0完成,光電頭產生的脈沖信號經2分頻后,得到頻率為轉子旋轉頻率一半的方波信號,該信號加到INT0上,將外部中斷0設置成邊緣觸發,在每個方波的下降沿產生中斷,MCU讀取TL0和TH0寄存器值,并將TL0和TH0清零,開始下一次計時,然后根據TL0和TH0的數值,計算轉子轉速,并根據TL0和TH0中轉子旋轉周期值的四分之一配置定時/計數器1的TL1和TH1,定時/計數器1工作于定時方式,通過定時/計數器1的中斷由兩路DAC產生相位差為90°兩路方波信號,用于對振動信號的相敏檢波,MCU對ADC0~ADC3進行A/D轉換,計算左右兩平面的不平衡量的大小和相位,然后將轉速及不平衡量的大小和相位送8279進行顯示。不平衡量測量的流程圖如圖3所示。該系統用于一臺渦輪轉子動平衡機的改造,收到了預期的效果。









評論