微處理器實現可通信智能電流繼電器

3.1 硬件接口
CAN-232采用ZLGCAN-232轉換卡,PC只需經RS 232接口簡單連接即可實現CAN數據通信,進行CAN信息幀的接收發送。CAN-232接口卡也可以直接應用到嵌入式系統中,可在不改變已有硬件結構的情況下使嵌人式產品具有CAN通信接口。RS 232總線接口部分是轉換卡板和PC機之間交換數據的橋梁,PC機之間的數據交換是通過MAX232實現的,其將232電平轉換成TTL電平。CAN通訊部分實現了CAN物理層和數據鏈路層協議,板卡中由帶CAN控制器的處理器P87C591構成。
3.2 軟件設計
可通信智能繼電器節點的主要任務是能夠獨立完成線路電流的實時監控和保護功能,并且能夠利用CAN總線接口與上位控制PC進行雙向數字通信功能。其中數據采集和轉換程序在T0中斷服務程序中進行,通信收發在CAN中斷子程序中進行。主程序采用循環查詢的方法檢測有無按鍵,然后定時處理一些如顯示數據更新、通信待發數據準備和接收數據處理等。
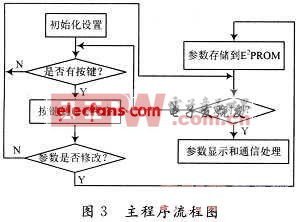
在智能節點控制系統軟件設計中,為了充分而合理的利用硬件資源并且構建一個清晰的程序構架,把程序大致分為:初始化程序、數據采集和轉換程序、監控存儲程序、按鍵和顯示程序、CAN通信程序、數據、計算處理程序以及起整體調度作用的主程序等模塊。主程序流程如圖3所示。
采用VB對上位軟件進行編程,調用CAN232智能CAN接口卡隨機提供功能強大的CAN接口函數庫文件(232CAN.h、232CAN.lib、232CAN.dl l),從而很方便的實現了CAN協議CAN2.0A和CAN2.0B規范PeliCAN的數據通訊。
上位PC節點的監控制程序和下位節點的設計相類似,也使用了模塊化的設計方法。可以很方便的在現有的程序基礎之上進行改造,通過添加新的模塊以達到功能擴展的需要。

上位PC節點的監控軟件主要由主界面、歷史數據和參數設定界面組成。其中主界面包含了上位節點設計中的主要和功能操作:串口和總線參數的設定、通信連接、數據發送、應答信息和工作狀態以及監控數據顯示等。歷史數據界面通過在上位PC節點的Windows操作系統下用Acess軟件建立一個數據庫,如表1所示的數據為下位節點在一定時間內運行采集的電流值。在VB中調用兩個控件Data和DBGrid將數據庫和上位節點的監控界面連接起來。參數設定界面可對節點的設定電流值和時間值進行修改,然后點擊設定輸入按鈕即可完成設定參數的發送。
4 結語
本文設計的基于CAN總線可通信的智能電流繼電器,不僅能夠完成傳統意義下電磁式電流繼電器、時間繼電器和信號繼電器組合在一起才能實現的限時速切功能,還可使現場電器與上位機實現雙向通信功能。通過上位PC機直接對電流和時間參數進行設定,還可直接從上位機查看繼電器采集的線路實時狀況參數(如線路電流和繼電器動作情況)。不但通訊效率高、抗干擾性強、傳輸距離較遠,而且與其他總線相比具有造價低廉、實現簡易的優勢,在低成本自動化領域將有著廣泛的應用前景。

時間繼電器相關文章:時間繼電器
基爾霍夫電流相關文章:基爾霍夫電流定律







評論