多MEMS傳感器的嵌入式姿態(tài)測量系統(tǒng)設計

3.1 MC9S08QE8的初始化
MC9S08QE8的初始化函數主要實現對系統(tǒng)時鐘、端口及各個使用的功能模塊進行初始化,如ADC模塊、SCI模塊、I2C模塊。初始化函數Sys_init_fun(void)如下:

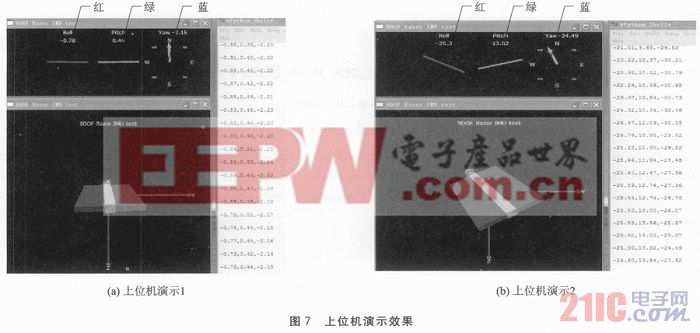
上述計算得到的實時姿態(tài)角數據通過串口傳送到上位機,上位機中通過編寫的python演示程序對下位機姿態(tài)測量模塊的運動姿態(tài)進行跟蹤與顯示,演示效果如圖7所示。每幅圖中包含3個部分:第1部分(左上角)中紅、綠、藍3種指針指向分別代表橫滾角(roll)、俯仰角(pitch)與航向角(yaw)的大小,第2部分(左下角)顯示模塊實時運動姿態(tài),第3部分(右邊)用于顯示姿態(tài)角信息。左圖為物體靜止不動下的演示效果,右圖表示在運動過程中物體的姿態(tài)運動效果,通過對比與分析2個圖及各圖對應3部分的效果,可以說明本設計達到了良好的效果,能比較正確地測量物體的姿態(tài)信息。本文引用地址:http://www.104case.com/article/150075.htm
結語
當前,各種消費電子設備內部一般含有三軸加速度計和電子羅盤,如智能手機、平板電腦等,但加速度計動態(tài)性能相比陀螺儀遜色很多,而陀螺儀的增加可以提升系統(tǒng)整體的動態(tài)與靜態(tài)性能。本文設計的嵌入式姿態(tài)測量系統(tǒng),采用多MEMS傳感器組合方式,拓展了MEMS傳感器的應用范圍,也延伸了姿態(tài)測量系統(tǒng)的應用領域。實驗演示表明系統(tǒng)性能和使用性都比較好,可以應用于消費電子與一般工業(yè)的姿態(tài)測量與物體穩(wěn)定控制的應用中。

接地電阻相關文章:接地電阻測試方法








評論