多MEMS傳感器的嵌入式姿態測量系統設計

摘要:針對姿態測量在低成本、低功耗、微型化應用中的需求,設計了三軸MEMS陀螺儀、加速度計、電子羅盤與嵌入式技術相結合的姿態測量系統。介紹了系統的組成結構,設計了嵌入式姿態測量硬件電路,并實現了基于姿態計算DCM算法的程序。上位機演示表明,系統的姿態測量結果準確、動態效果好。
關鍵詞:姿態測量;MEMS傳感器;嵌入式技術
引言
傳統的姿態測量因為采用高精度陀螺儀和加速度計等姿態傳感器,體積龐大并且價格昂貴。當前MEMS產品因其體積小、價格低、功耗低,被稱為是傳統的慣性測量組合的一次重大改革,越來越多地應用于姿態測量應用中。并且,隨著MEMS技術的迅速發展以及向各個學科領域的滲透,它的各方面性能如精度、魯棒性、動態響應等都得到了巨大的提高。
隨著嵌入式技術的不斷發展,以應用為中心的嵌入式系統由于體積小、功耗低、可靠性高、可裁減性好、軟硬件集成度高,已經滲入到我們日常生活的各個方面,在各行各業中都得到了應用。而嵌入式與MEMS的結合使姿態測量系統滿足了低成本、低功耗、微型化的應用需求,給消費電子領域帶來了巨大進步,如智能手機中的重力感應與指南針,同時給航空、工業、汽車、醫療、環境監控、通信等領域帶來了十分廣闊的應用前景。
本文采用三軸MEMS陀螺儀、三軸MEMS加速度計及三軸MEMS電子羅盤與Freescale單片機MC9S08QE8組成一個嵌入式姿態測量系統。陀螺儀由于動態性能好,用于獲取實時姿態信息。但陀螺儀因為會產生偏移,而加速度計與電子羅盤因其靜態性能比較優越,所以用來對陀螺儀姿態計算過程中的誤差進行修正。
1 系統組成和結構
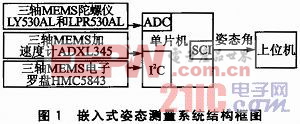
本系統主要由單軸陀螺儀LY530AL、雙軸陀螺儀LPR530AL、三軸MEMS加速度計ADXL345、三軸MEMS電子羅盤HMC5843及單片機MC9S08QE8組成。其中X、Y方向的雙軸陀螺儀與Z軸方向的單軸陀螺儀組合成三軸陀螺儀,它們的信號由單片機MC9S08QE8的ADC模塊進行采集,而加速度信號和電子羅盤信號則通過I2C總線傳送到單片機。這9路信號在單片機中首先經過前期的處理,而后由單片機中的姿態計算算法程序獲取3個姿態角信息,這3個信息通過單片機MC9S08QE8的串口模塊傳送到上位機進行演示,嵌入式姿態測量系統結構框圖如圖1所示。
1.1 三軸MEMS陀螺儀
系統中三軸MEMS陀螺儀由ST公司的單軸Z方向的陀螺儀LY530AL和雙軸X、Y方向的陀螺儀LPR530AL組合而成。它們采用電容式微機械陀螺儀原理,由于ST公司選用了音叉方法,并且振動驅動電路采用了雙閉環的控制結構,顯著地提高了陀螺儀的穩定性和分辨率。測量范圍達±300°/s,擁有自測功能,輸出端集成了低通濾波電路,工作電壓為1.8~3.6 V,待機模式電流小于1μA。
1.2 三軸MEMS加速度計
系統中三軸MEMS加速度計選用ADI公司的ADXL345。ADXL345是基于iMEMS技術的三軸、數字輸出加速度傳感器,具有±2g、±4g、±8g、±16g可變的測量范圍。芯片內帶的32級FIFO存儲可以緩存數據,從而減輕處理器的負擔并降低了系統功耗。ADXL345具有較高的分辨率與靈敏度、3 mm×5 mm×1 mm超小封裝、40~145μA超低功耗及標準的I2C或SPI數字接口,非常適合于移動設備的應用。
1.3 三軸MEMS電子羅盤
系統中的三軸MEMS電子羅盤采用霍尼韋爾公司的HMC5843,它采用霍尼韋爾公司的各向異性磁阻(AMR)技術,由霍尼韋爾高精度的HMC11 8X系列磁阻傳感器組成,在低強度磁場傳感器中具有較高的靈敏度和可靠性。2.16~3.3 V的低電壓供電、0.66 mA電流功耗,以及3mm×3 mm×0.9 mm的小體積,在消費電子設備、導航系統中擁有明顯的優越性。
1.4 單片機MC9S08QE8
系統中單片機采用Freescale公司的MC9S08QE8。MC9S08QE8采用了眾多新技術,如電池壽命、延長技術、增強型的低功耗性能以及超低電壓下的高級運行能力等。同時具有極高的集成度,集成了很多系統級功能,如12位高精度A/D轉換器、定時器、SPI、I2C、SCI等常用模塊,非常適合低功耗、低成本的應用。
2 應用電路設計
2.1 電源模塊
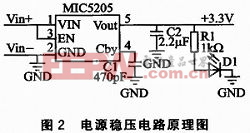
本系統的電源穩壓電路為整個系統所有設備供電,考慮到系統中涉及數字型和模擬型傳感器,采用了低噪音、低漂移、供電電壓為3.3 V的線性穩壓芯片MIC5205。電源穩壓電路原理圖如圖2所示。其中,C1是連接芯片內部電壓參考源與GND的電容,用來減少輸出電壓的噪音,而C2作為輸出與GND的電容,用來防止電路產生振蕩。C2的電容大小與C1有關,但當C1為470 nF時,C2一般為2.2μF。D1為電源的指示燈。

接地電阻相關文章:接地電阻測試方法








評論