科學家設計6腿蜥蜴機器人有望未來勘測火星
—— 意味著未來我們可以派遣快速行進漫步車登陸火星表面進行勘測

車輪非常適合在平坦道路上行進,但當地面上覆蓋松散的沙子和較大的巖石時,機械裝置則寸步難行。目前,科學家依據蜥蜴活動特征最新研制一款6腿機器人,該創新技術意味著未來我們可以派遣快速行進漫步車登陸火星表面進行勘測。
本文引用地址:http://www.104case.com/article/143502.htm
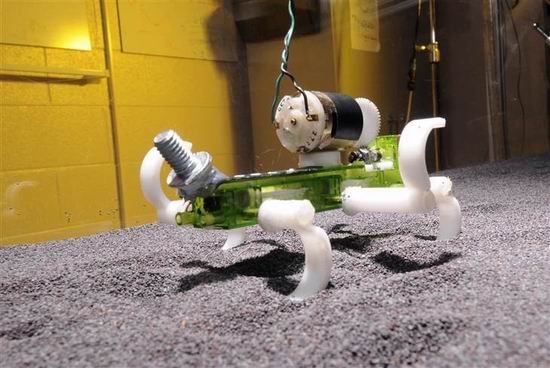
科學家最新設計一種蜥蜴機器人,可適用于沙質表面行進
美國喬治亞理工學院物理學家丹尼爾-古德曼稱,像這款機器人的附肢非常適用于較少固體物質表面上行進。之前科學家曾設計具有鳥類特征的飛機和海豚特征的水下航行器,然而他們很少知道足部蹦跳和沙質微粒之間的互動作用,為什么蜥蜴能夠快速穿行沙地仍是一個謎團。
他和同事使用X射線和其它觀測技術研究了蜥蜴如何在沙地表面奔跑,并提出一種理論描述該動物行進的物理原理。研究小組首次使用計算機模擬測試了該理論,之后設計了一款6腿機器人,有助于在沙箱中蹦跳,這個沙箱放置著罌粟籽和玻璃珠等微粒。
研究小組設計的6腿機器人具有C型足部,這是在沙箱中行進的最優化設計,這個機器人體長12.7厘米,重量為0.136公斤,是適用于搜尋和營救任務的機器人,它還能在火星等表面進行環境勘測。
古德曼指出,目前不僅意味著我們能潛在理解蜥蜴腿部外型的運行原理,還能揭曉一個機器人如何能夠在松散物質上奔跑。目前,這份研究報告發表在《科學》雜志上。
該研究小組將進一步改善設計模型來解釋沙層流動,像沙丘等丘陵地帶的顆粒物質,理解潮濕沙層中的交互作用。加州理工學院機械工程師梅蘭妮-亨特說:“在沙丘上行進具有一定的挑戰性,這款機器人對于理解松散地形和機械裝置非常有用。”
這款新型機器人有望幫助美國宇航局發射巨大的機械蜥蜴抵達火星表面,在丘陵、沙質地形上蹦跳行進,如果火星表面真實存在遠古湖泊,將有望采集到大量潮濕的沙層樣本。








評論