基于載流導線循跡智能車的數學模型

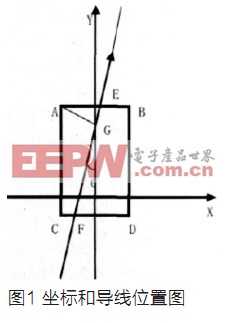
如圖1,兩電感A和B水平放置,二者軸線與x軸平行,相距![]() ,離地高度
,離地高度![]() 。記
。記![]() 。下面將用到文獻[4]的方法,以避免開根號。
。下面將用到文獻[4]的方法,以避免開根號。
A電感的變量用下標A表示,B電感的變量用下標B表示。為了方便運用法一,不妨令![]() 。
。
顯然![]() , 易得
, 易得 ![]() ,
,
那么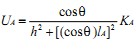 ,其中
,其中![]()
不妨假設![]() 較小,可以忽略。則
較小,可以忽略。則![]() ••••••(3)
••••••(3)
同理得![]() ,其中
,其中![]() ••••••(4)
••••••(4)
![]() ••••••(5)
••••••(5)
聯立(3)、(4)、(5),解得。注意![]() 是有正負的。
是有正負的。
實驗數據如表1。所有單位均為標準點位,電壓是示波器讀取的峰峰值,誤差是未取絕對值的相對誤差。

結論:除第二組外,其他組的誤差都小于10%,大部分小于5%,且與賽道無明顯關系。說明該數學模型正確,同時也佐證了法1.1的正確性。












評論