基于載流導(dǎo)線循跡智能車的數(shù)學(xué)模型


這種方法有幾個(gè)優(yōu)點(diǎn):一是表達(dá)式與電路傳遞函數(shù)無關(guān),即與電路無關(guān),這就使得電路設(shè)計(jì)從理論上講極其簡單,只需滿足線性時(shí)不變;二是表達(dá)式與賽道電流無關(guān),這就使得該方法推導(dǎo)的模型從理論上講具有極強(qiáng)的適應(yīng)性;三是該方法推導(dǎo)的模型運(yùn)用起來簡單高效。
1.1 雙一電感測距
如圖1,兩電感A和B水平放置,二者軸線與x軸平行,相距l(xiāng),離地高度h。記![]() 下面將用到文獻(xiàn)[4]的方法,以避免開根號。
下面將用到文獻(xiàn)[4]的方法,以避免開根號。
A電感的變量用下標(biāo)A表示,B電感的變量用下標(biāo)B表示。
為了方便運(yùn)用法一,不妨令
顯然![]() , 易得
, 易得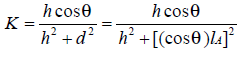 ,
,
那么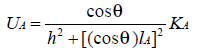 ,其中
,其中
不妨假設(shè)θ較小,可以忽略。則
同理得 22BBBKUhl=+,其中
聯(lián)立(3)、(4)、(5),解得 注意Al是有正負(fù)的。
注意Al是有正負(fù)的。
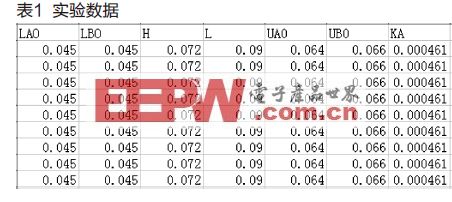
實(shí)驗(yàn)數(shù)據(jù)如表1。所有單位均為標(biāo)準(zhǔn)點(diǎn)位,電壓是示波器讀取的峰峰值,誤差是未取絕對值的相對誤差。
結(jié)論:除第二組外,其他組的誤差都小于10%,大部分小于5%,且與賽道無明顯關(guān)系。說明該數(shù)學(xué)模型正確,同時(shí)也佐證了法1.1的正確性。
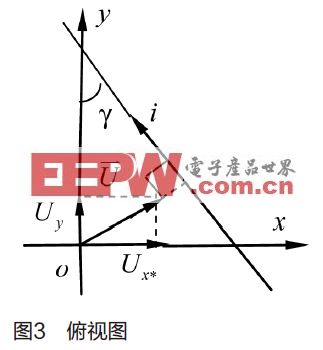
1.2 雙水平正交電感測距、測方向
如圖2所示,兩電感xL和xL相互垂直。圖3為俯視圖,xL和yL置于原點(diǎn)o,xL和yL的軸向分別與x和y軸重合,o距地面高度為h,導(dǎo)線與y軸夾角為γ。xL和yL的相關(guān)變量分別以下標(biāo)x和y表示。注意,xL和yL各自的電路傳遞函數(shù)是不相同的,下文會將其校正。
易得xL和yL的空間函數(shù)分別為
令00γ≠,運(yùn)用法一可得
















評論