基于視覺(jué)傳感器的智能車(chē)攝像頭標(biāo)定技術(shù)研究(下)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
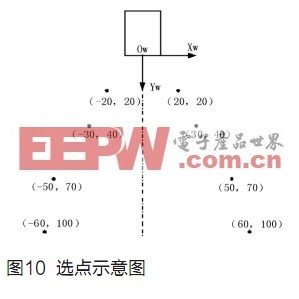
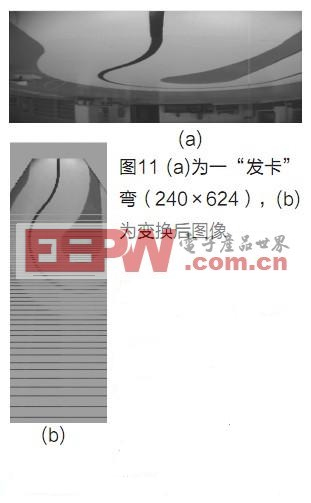
在單片機(jī)程序中,當(dāng)圖像預(yù)處理得到(U,V)后,可根據(jù)式5解出(Xw,Yw),差別是(U,V)處于不同位置時(shí)用不同的參數(shù)。由于相鄰梯形有兩個(gè)點(diǎn)是復(fù)用的,所以參數(shù)不會(huì)出現(xiàn)跳躍。圖11顯示該方法效果很好。
文獻(xiàn)[7]中提到可以選取很多點(diǎn),然后采用最小二乘法進(jìn)行擬合。但是由于各像素點(diǎn)失真程度不一樣(越遠(yuǎn)離圖像中心失真越嚴(yán)重),所以最后結(jié)果可能是本來(lái)失真較小的點(diǎn)被失真較大的點(diǎn)所“拖累”,沒(méi)有一個(gè)點(diǎn)是準(zhǔn)確的。
情況(2):攝像頭俯角較大,跑道會(huì)出現(xiàn)在圖像各個(gè)位置(如圖1(b)所示),這時(shí)單片機(jī)需要對(duì)整幅圖像進(jìn)行處理。可使用下列方法。
這時(shí)不再讓U=Xu,V=Yu,而是設(shè)

從圖像中讀出多個(gè)像素坐標(biāo)(U,V),令k初值為0.00001,通過(guò)式7解出(Xu,Yu),根據(jù)式6通過(guò)最小二乘法解出 ,再根據(jù)式5求出(Xw,Yw),求出擬合誤差sum_err。(這里要將式5與式6中的U、V分別換成Xu、Yu)。有關(guān)最小二乘法可參考文獻(xiàn)[8]。
將k累加0.00001,同樣的步驟可求出sum_err。
畫(huà)出k與sum_err曲線,sum_err起初隨著k增大而減小,但從某個(gè)k開(kāi)始又開(kāi)始增大,k值即取拐點(diǎn)處的值。
結(jié)論
本文根據(jù)攝像頭成像模型,導(dǎo)出逆透視變換公式,并根據(jù)兩種情況分別給出解決方案。該解決方案方便可行,可供各參賽攝像頭隊(duì)伍參考。
參考文獻(xiàn):
[1]卓晴,黃開(kāi)勝,邵貝貝等. 學(xué)做智能車(chē)[M].北京:北京航空航天大學(xué)出版社,2007:17.
[2]諶彤,童周力,張文超. 國(guó)防科技大學(xué)“紅旗Ⅰ”隊(duì)技術(shù)報(bào)告[R].2008:53-55.
[3]楊樹(shù)峰、王瀟楊、李國(guó)洪. 東北大學(xué)“獵豹”隊(duì)技術(shù)報(bào)告[R].2009:23-26.
[4]趙祥磊,吳穎熹,雷典. 吉林大學(xué)“愛(ài)德”隊(duì)技術(shù)報(bào)告[R].2009:附錄A 1-4.
[5]劉運(yùn)銀,劉帥,洪長(zhǎng)志. 合肥學(xué)院“突擊”隊(duì)技術(shù)報(bào)告[R].2009:53-54.
[6]陳易廳,蘇文友,關(guān)振明. 華南理工大學(xué)“急速”隊(duì)技術(shù)報(bào)告[R].2009:22-23.
[7]胡晨暉,陸佳南,陳立剛. 上海交通大學(xué)“CyberSmart”隊(duì)技術(shù)報(bào)告[R].2007:90-92.
[8]馮培悌. 系統(tǒng)辨識(shí)(第二版)[M].杭州: 浙江大學(xué)出版社,2004:56-58.
[9]汪國(guó)有,俞立科,張?zhí)煨? 一種新的大視場(chǎng)景象的幾何失真校正方法[J]. 數(shù)據(jù)采集與處理,1996,11(2):112-115.
風(fēng)速傳感器相關(guān)文章:風(fēng)速傳感器原理



















評(píng)論