基于視覺傳感器的智能車攝像頭標(biāo)定技術(shù)研究(下)
作者:王建 中國科學(xué)技術(shù)大學(xué)自動化系 張曉煒 楊錦 昝鑫 劉小勇 西安交通大學(xué)
時間:2010-07-16
來源:電子產(chǎn)品世界
收藏
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對面交流
海量資料庫查詢
實(shí)驗(yàn)方法
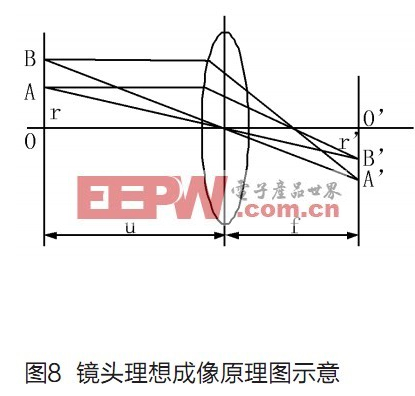
情況(1):攝像頭俯角小,雖有桶形失真,但關(guān)鍵區(qū)域處于圖像中部。如圖9所示。分段逆透視變換適用于這種情況。

若忽略桶形失真,即讓U=Xu+Center_u,V=Yu +Center_v(注意圖7中圖像原點(diǎn)Ouv在攝像頭坐標(biāo)系中坐標(biāo)為(- Center_u,- Center_v,f)),則由公式1和公式2可知,
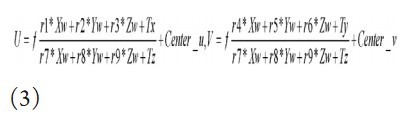
由于Zw=0,上式又可寫成:
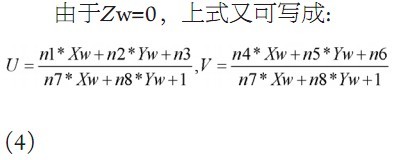
反解Xw,Yw,可得:
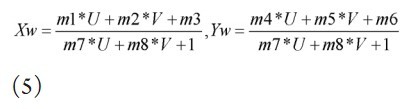
上式又可寫成:

理論上根據(jù)4個點(diǎn)m1-m8就可以有一組解。
實(shí)驗(yàn)步驟如下:以車頭為原點(diǎn),在車頭前選取8個點(diǎn),如圖10所示(單位:cm)。 選點(diǎn)要求范圍盡量大,跑道經(jīng)常出現(xiàn)的區(qū)域,但又不能處于攝像頭輸出圖像邊緣區(qū)域;從圖9中讀出各點(diǎn)像素坐標(biāo)(a,b);根據(jù)分辨率將各像素坐標(biāo)轉(zhuǎn)換為單片機(jī)圖像坐標(biāo),這是一個線性變換;將8個點(diǎn)分成near、middle、far三組,每組4個點(diǎn),根據(jù)式6可求出三組解。
風(fēng)速傳感器相關(guān)文章:風(fēng)速傳感器原理



















評論