基于DSP高精度伺服位置環(huán)設(shè)計(jì)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
控制器算法
本文引用地址:http://www.104case.com/article/110546.htm系統(tǒng)采用三環(huán)控制結(jié)構(gòu),電流環(huán)、速度環(huán)采用PI控制,位置環(huán)采用比例加前饋補(bǔ)償控制。
PID控制算法
PID控制算法是控制中最常用的算法,對(duì)于大多數(shù)的控制對(duì)象采用PID控制均能達(dá)到滿意的效果。為防止PID調(diào)節(jié)器出現(xiàn)過飽和,系統(tǒng)采用帶退飽和的PID控制器,如圖2所示。

離散PID控制算法如下:
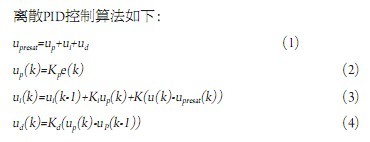
式中,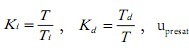 ,upresat為飽和前的輸出,KP為PID控制的比例增益,Ti為PID控制的積分時(shí)間常數(shù),Td為PID控制的微分時(shí)間常數(shù),Kc為退飽和時(shí)間常數(shù)。
,upresat為飽和前的輸出,KP為PID控制的比例增益,Ti為PID控制的積分時(shí)間常數(shù),Td為PID控制的微分時(shí)間常數(shù),Kc為退飽和時(shí)間常數(shù)。
位置控制器的控制算法
位置控制器采用比例加前饋控制結(jié)構(gòu),如圖3所示,其中Gm為電機(jī)的傳遞函數(shù),Gspd為速度環(huán)的傳遞函數(shù),Gpos為位置環(huán)的傳遞函數(shù),F(xiàn)pos為位置前饋控制器傳遞函數(shù)。

系統(tǒng)的傳遞函數(shù)為:

當(dāng)Fpos(s)=1/(Gspd(s)Gm(s))時(shí),H(s) =1,則可使輸出完全復(fù)現(xiàn)輸入信號(hào),且系統(tǒng)的暫態(tài)和穩(wěn)態(tài)誤差都為零。其中當(dāng)速度調(diào)節(jié)器采用PI控制時(shí),在位置環(huán)的截止頻率遠(yuǎn)小于速度環(huán)的截止頻率時(shí),速度環(huán)可等效為一個(gè)慣性環(huán)節(jié),電機(jī)可等效為一個(gè)積分環(huán)節(jié),于是Fpos(s)可以看成加速度前饋和速度前饋兩部分,其中:位置前饋中加速度項(xiàng)差分方程:
![]()
式中R(k)為第K個(gè)采樣周期中的位置給定信號(hào);Yaf為第K個(gè)采樣周期中加速度信號(hào)的輸出,Kaf為加速度前饋比例系數(shù)。

伺服電機(jī)相關(guān)文章:伺服電機(jī)工作原理
分頻器相關(guān)文章:分頻器原理








評(píng)論