輪式自動機器人控制系統(tǒng)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對面交流
海量資料庫查詢
引言
本文引用地址:http://www.104case.com/article/110545.htm自主移動機器人是指具有行動決策和規(guī)劃,以及自動執(zhí)行能力,集人工智能、智能控制、信息處理、檢測與轉(zhuǎn)換等專業(yè)技術(shù)為一體的系統(tǒng)。一般移動機器人都是基于行為的,機器人只有到達指定位置才開始執(zhí)行其他動作,因此導(dǎo)航和定位是移動機器人研究的重要問題。本文采用陀螺儀和光電編碼器的慣性導(dǎo)航方式,并且采用LPC2478構(gòu)建整個控制系統(tǒng),并在一臺機器人上得以實現(xiàn)。
本設(shè)計的輪式自動機器人的控制系統(tǒng)主要分為主控模塊、傳感器采集模塊、運動控制模塊、執(zhí)行動作控制模塊和人機交互模塊五個部分。傳感器采集處理模塊主要采集陀螺儀和編碼器的信息并作初步的處理,構(gòu)成機器人的感知單元,相當(dāng)于機器人的“五官”。主控模塊是機器人的智能單元,對采集到的外部信息進行分析處理并做出決策,相當(dāng)于機器人的“大腦”。運動控制模塊和執(zhí)行動作控制模塊是機器人的執(zhí)行單元,相當(dāng)于機器人的“四肢”。人機交互模塊完成人對機器人的設(shè)置,并且能夠顯示機器人的運行狀態(tài),是人和機器人之間的“橋梁”。
硬件系統(tǒng)
硬件系統(tǒng)在設(shè)計時采用模塊化的思想,為了提高系統(tǒng)的處理速度和并行工作能力,整個系統(tǒng)采用了一個包含多個處理器的可以并行工作的高效系統(tǒng)。每個模塊都擁有獨立的處理器使得整個系統(tǒng)很容易根據(jù)具體應(yīng)用進行裁剪和擴展。
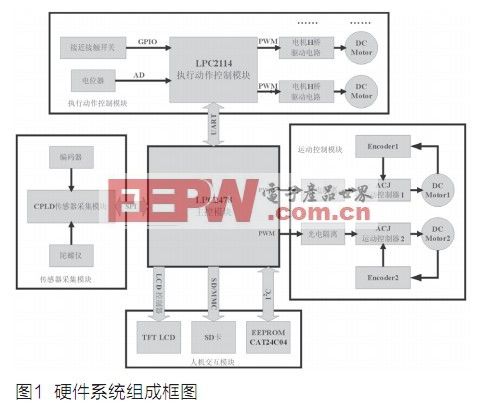
整個硬件系統(tǒng)組成如圖1所示。硬件系統(tǒng)的所有模塊在主控模塊的控制下協(xié)調(diào)工作,主控模塊采用NXP公司ARM7微控制器LPC2478,該器件具有豐富的通信接口,很容易將其他模塊連接在一起實現(xiàn)集中控制。CPLD傳感器采集模塊將采集到的傳感器信息通過SPI發(fā)送給主控模塊。運動控制模塊采用工業(yè)運動控制器,內(nèi)部集成的DSP實現(xiàn)走行電機的閉環(huán)控制。執(zhí)行動作控制模塊采用LPC2114,通過UART來接收主控模塊的控制指令,根據(jù)指令來控制執(zhí)行機構(gòu)完成相應(yīng)的動作。
主控模塊
主控模塊是整個機器人控制系統(tǒng)的核心,集中控制系統(tǒng)的其他模塊。主控模塊需要接收傳感器采集模塊的信息,并對各種傳感器的信息進行處理和分析,做出相應(yīng)的決策來控制機器人的運動軌跡和執(zhí)行動作。因此各個模塊都需要連接到主控模塊上,主控模塊通過通信接口接收信息和發(fā)送指令信息,這就要求主控制器要有豐富的通信接口。LPC2478 ARM7處理器為這種多類型的通信應(yīng)用提供了理想的解決方案。它包括4個UART接口、1個SPI接口、1個SSP接口、USB控制器等,豐富的串行接口使系統(tǒng)連接變得非常簡單,并且給系統(tǒng)升級留下了空間。











評論