基于視覺傳感器的智能車攝像頭標定技術研究(上)
作者:王建 中國科學技術大學自動化系 張曉煒 楊錦 昝鑫 劉小勇 西安交通大學
時間:2010-06-21
來源:電子產(chǎn)品世界
收藏
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
將實驗板垂直放置,做出邊長為A1的正方形標定區(qū)域,即圖3中的DE平面,將攝像頭水平對向?qū)嶒灠逯行腃,攝像頭架固定螺釘距實驗板距離為H1。讀出標定實驗板上特征點的相應像素點。可以得到圖4中(X,Y)與像素點(U,V)的關系(U為行數(shù),V為列數(shù))。
本文引用地址:http://www.104case.com/article/110158.htm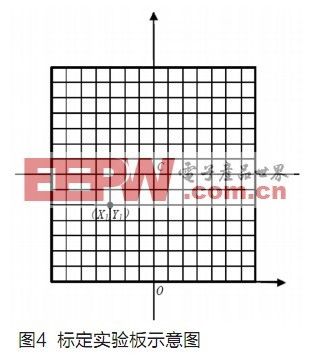
由于實驗平面與真實視野平面之間是純幾何關系,因此這部分轉(zhuǎn)換函數(shù)關系可以用幾何推導。 其公式較復雜,在這里不一一列出。
其公式最大的弊端在于有很多sin()、cos()等三角函數(shù)運算,但單片機做這種運算會花費大量時間,所以本應盡量避免出現(xiàn)三角函數(shù)、開方等運算。而且,若采用廣角鏡頭或攝像頭架得較低時,B點將會距A點很遠而找不到B點。所以該方法也不具通用性。實驗本身也比較復雜。
文獻[5]采用的實驗方法是:事先在一塊白板上畫一系列小的正方格,正方格越小,精度越高。然后標定中心黑粗線,用來確定賽車的擺放位置和圖像的中心。如圖5所示。之后可以直接讀出各特征點相應的像素坐標,建立對應關系。
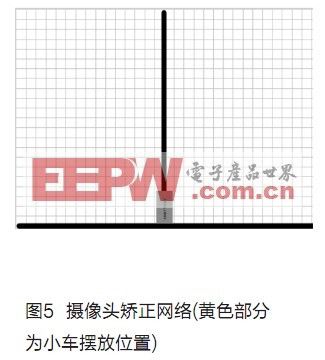
該實驗方案很直觀,但其操作未必簡便。因為攝像頭視野較廣,所需矯正網(wǎng)絡也較大,在其上畫方格線很難保證絕對水平或垂直。
文獻[6]根據(jù)幾何數(shù)學建模,得出攝像頭獲取圖像的成像坐標與景物實際的世界坐標的關系。

傳感器相關文章:傳感器工作原理
風速傳感器相關文章:風速傳感器原理 攝像頭相關文章:攝像頭原理


















評論