EPR6-S工業機器人通過EtherCAT轉profinet網關接入西門子系統

EPR6-S工業機器人專用六軸伺服驅動器通過EtherCAT轉profinet網關與西門子PLC1200連接
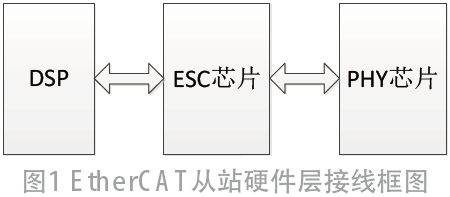
本案例EtherCAT轉profinet(Profinet轉EtherCAT)網關連接EPR6-S工業機器人專用六軸伺服驅動器用于汽車安裝現場的配置案例。用到的設備為西門子1200PLC一臺,EtherCAT轉profinet(Profinet轉EtherCAT)網關一個,EPR6-S工業機器人專用六軸伺服驅動器一臺。


首先我們要在西門子PLC博圖中進行組態,點擊管理通用站描述文件,再點擊右側“...”從查找GSD所在文件,勾選當前GSD文件安裝至成功。


從右側硬件目錄-其他以太網設備--PROFINET IO--Gateway--GW--PN-ECAT找到網關模塊進行組態。
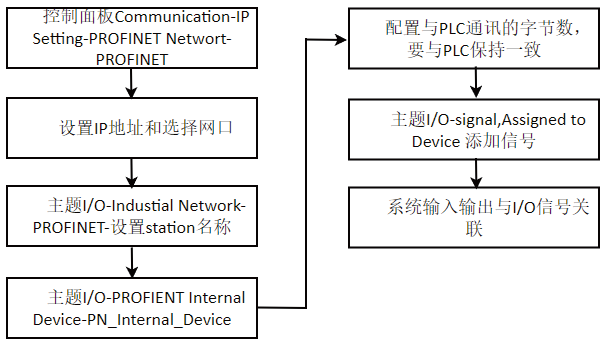
雙擊EtherCAT轉profinet(Profinet轉EtherCAT)網關屬性設置EtherCAT轉profinet(Profinet轉EtherCAT)網關的IP地址和設備名稱,設置EtherCAT轉profinet(Profinet轉EtherCAT)網關設備名稱要把自動生成取消勾選,重新輸入新的名稱,如果輸入的名稱包含/*_等特殊符號,配置軟件的名稱以轉換的名稱為準。
配置好IP地址和設備名稱后再添加EtherCAT轉profinet(Profinet轉EtherCAT)網關的輸入輸出字節數長度,下載組態到PLC。
下面是使用配置對PN-ECAT網關進行參數配置和下載,打開EtherCAT轉profinet(Profinet轉EtherCAT)網關配置軟件進行ECAT設置。
新建項目,選擇PN2ECAT,配置軟件的ip地址和設備名稱要和博圖一致。


導入從站設備ESI后,在設備列表中下方搜索查找并選定所需設備。
對EPR6-S工業機器人專用六軸伺服驅動器進行參數配置,無論在RX PDOS還是TX PDOS都是可以添加任意所需參數。。


配置完成后進行連接步驟。
先點擊預運行再點擊運行。重新給配置軟件的ip地址和設備名稱要和博圖一致,EtherCAT轉profinet(Profinet轉EtherCAT)網關上電即可。
組態和配置軟件都配置完并下載后,配置軟件的ip地址和設備名稱要和博圖一致網關燈正常顯示為直接對對應的I、Q地址讀寫即可。
以上是EPR6-S工業機器人專用六軸伺服驅動器通過EtherCAT轉profinet(Profinet轉EtherCAT)網關實現了智能PLC伺服器之間的PROFINET通訊。通過該配置軟件的ip地址和設備名稱要和博圖一致,智能PLC能夠與工業機器人專用六軸伺服驅動器進行快速、穩定的通訊,實現數據的傳輸和控制。
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。