AFM綜述:基于軟體機械手的觸覺傳感技術研究進展

清華大學深圳國際研究生院曲鈞天課題組在柔性機械手先進觸覺傳感技術領域發表綜述論文,這項工作系統梳理了不同類型的觸覺傳感技術、感知模態和方法,總結歸納了基于柔性機械手的觸覺傳感器特點和系統集成方法,以及多場景觸覺感知應用。最后,文章探討了該領域面臨的挑戰。本綜述旨在為未來軟體機械手觸覺感知技術的發展和智能軟體機械手的應用提供重要指導。
 圖1 觸覺感知軟體機械手
圖1 觸覺感知軟體機械手觸覺感知技術在人機交互領域具有重要價值。分布在軟體機械手的觸覺傳感器能夠在非結構化的場景交互中為人們提供多模態感知信息,如接觸狀態(穩態、滑動、扭轉等)、表面特征(粗糙度、紋理、曲率等)、物理屬性(形狀、重量、剛度等),這些信息對于機器人與環境、環境與人,人與機器人的安全交互、靈巧操作起到了至關重要的作用。具有觸覺感知的軟體機械手將更具智能化、安全性和靈促進這一領域的研究發展。
作者在文章中首先分別就傳感原理及其結構介紹了應用于軟體機械手的觸覺傳感器(圖2),包括電容式觸覺傳感器、壓阻式觸覺傳感器、壓電式觸覺傳感器、基于視觸覺傳感器、光纖布拉格光柵觸覺傳感器、摩擦電式觸覺傳感器、電磁式觸覺傳感器、智能紡織品和纖維等先進的觸覺傳感器,并針對不同典型觸覺傳感器的主要性能(如靈敏度、量程、分辨率等)及傳感優缺點進行了對比分析。此外,作者還討論了觸覺傳感器系統集成方法,包括用于檢測各種刺激的先進觸覺傳感器、數據傳輸與功耗管理。
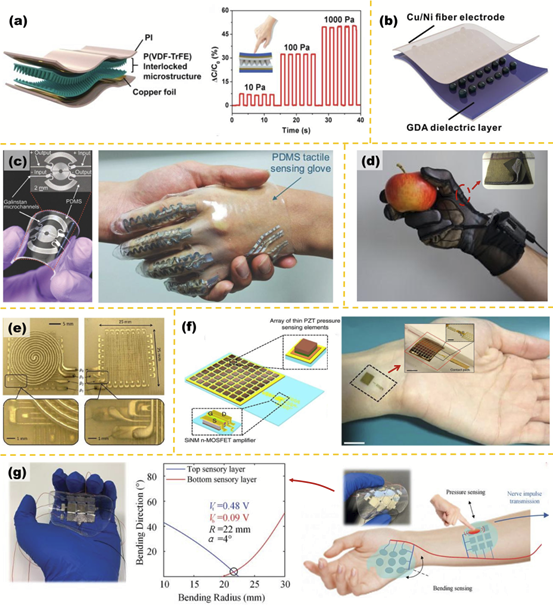 圖2 電容、壓阻和壓電觸覺傳感器
圖2 電容、壓阻和壓電觸覺傳感器與傳統的剛性機械手相比,軟體機械手具有與非結構化環境交互更安全、變形能力更靈活的優點,為了增強智能感知能力,研究人員采用了大量的觸覺傳感器來獲取抓取物體信息。作者分別從力感知、物體屬性感知、滑動感知,以及融合感知四個方面分別探索了不同的觸覺感知模態,分析并對比了用于軟抓手觸覺感知的典型機器學習方法。此外,作者還討論了用于軟抓手的觸覺傳感技術的特殊要求。
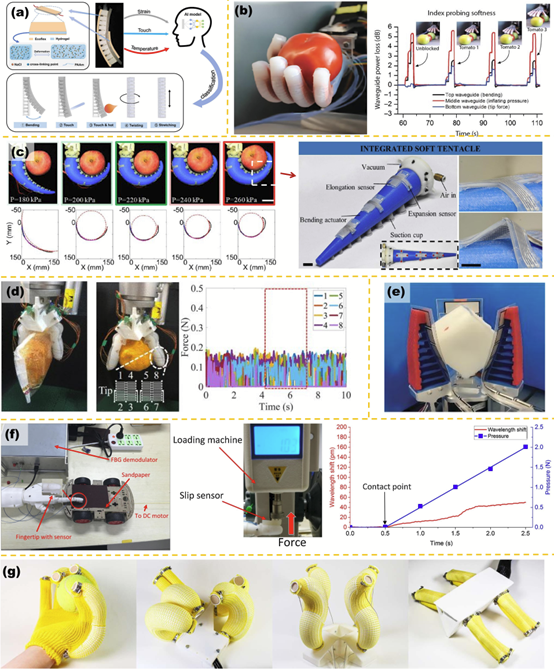 圖3 物體屬性觸覺感知技術的應用
圖3 物體屬性觸覺感知技術的應用近年來,機器人和剛性機械手得到了廣泛的應用,而軟體機械手的出現,將任務操作的性能提高到了一個新的層面。文章作者分別從水下、醫療、農業、工業領域介紹了軟體機械手的應用場景,如水下活體生物抓取、神經假肢、果蔬采摘與分類、貨物搬運等。
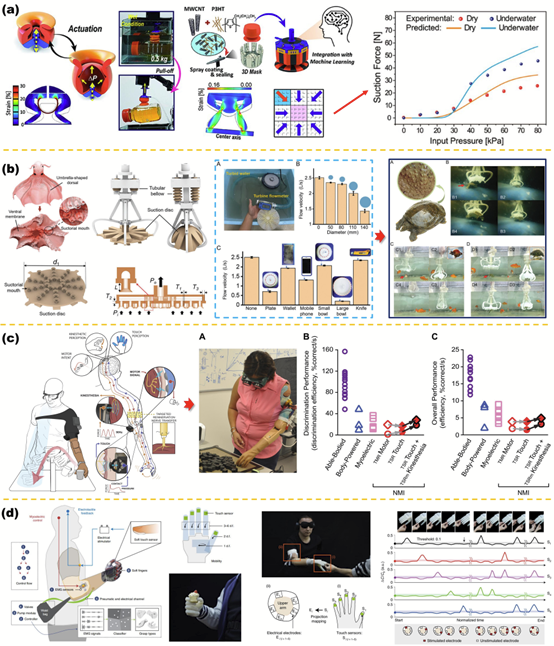 圖4 具有觸覺感知的軟體機械手在水下與醫療方面給的應用
圖4 具有觸覺感知的軟體機械手在水下與醫療方面給的應用文章作者全面的調研了目前國內外學者應用于軟體機械手的觸覺感知技術研究進展,回顧以往的研究,作者提出了以下仍需克服的挑戰:
(1)研發先進的觸覺感知傳感器。目前的柔性觸覺傳感器,其耐用性和可靠性低、復雜度高、兼容性較差、靈活性低、壽命低。此外,用于大面積壓力檢測的觸覺傳感器陣列和旨在獲得多種傳感器功能的多模態觸覺傳感器將成為集成觸覺傳感器系統的發展趨勢,該領域尚未取得重大突破。
(2)算法的有效性不足。近年來,CNN、DNN、SVM等機器學習算法被廣泛應用于觸覺感知信息的分析。然而,人工智能算法訓練時間成本較高,且泛化能力仍然不足,導致感知的準確性不是很高。因此,高效的算法在處理軟體機械手的觸覺感知信息方面具有重要作用。
(3)欠缺可靠的控制策略。目前,大多數軟體機械手僅停留在觸覺感知水平,為了使軟抓器安全、自適應地抓取目標,基于觸覺傳感器的觸覺信息需要可靠的閉環控制策略。由于軟材料的影響,這些閉環控制策略必須具有快速響應、高控制精度和抗干擾等特點。
(4)成本方面。降低軟抓手的復雜觸覺感知系統的成本也不容忽視,不僅要考慮觸覺傳感器的成本,還要考慮硬件設備、控制系統、軟件等的成本。
為了解決觸覺傳感技術在軟抓手應用中面臨的挑戰,未來可考慮以下幾方面進行深入研究:
(1)結構:為提高觸覺感知性能,除傳統的創新手段改善微觀工程結構外,我們還可從自然界中汲取靈感,利用仿生機制設計各種微觀觸覺感知微觀結構,如捕蠅草的應激反應、小鼠的觸須等。
(2)材料:考慮采用非聚合物材料,可通過創造額外的自由體積空間來減少聚合物鏈的變形,以提高傳感器的響應速度,解決粘彈性引起的遲滯效應。此外,開發出更具生物相容性和類似生命性的新型軟材料,以及抗疲勞的天然合成人工肌肉組織。
(3)制造方法:在3D打印的基礎上發展可以從多個參數進行調整的增材制造技術,如可變剛度材料打印、微納米多層結構材料打印等。
(4)算法及控制:一是結合大模型開發更高效的機器學習算法實現海量觸覺信息的精準識別,二是將神經網絡控制與經典控制方法結合實現軟抓手的精準操作。
來源:ASNChina
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。