Apollo開(kāi)放平臺(tái):從自動(dòng)駕駛場(chǎng)景能力到開(kāi)發(fā)者易用性(1)
發(fā)布人:AI科技大本營(yíng)
時(shí)間:2023-08-22
來(lái)源:工程師
發(fā)布文章
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)

 開(kāi)發(fā)者調(diào)研
開(kāi)發(fā)者調(diào)研從2022年上半年開(kāi)始,我們進(jìn)行了社區(qū)的第一次NPS調(diào)研,并形成了半年一次的面向所有開(kāi)發(fā)者的例行反饋機(jī)制。表1是2022年上半年第一次NPS調(diào)研的數(shù)據(jù),Apollo整體NPS極高,但感知和PnC(規(guī)劃與控制)的開(kāi)發(fā)體驗(yàn)NPS極低。這也進(jìn)一步印證了我們對(duì)于Apollo社區(qū)價(jià)值與產(chǎn)品價(jià)值差距的認(rèn)知。
 表1 2022年上半年NPS數(shù)據(jù)同時(shí),在每次發(fā)版前,我們會(huì)進(jìn)行alpha內(nèi)測(cè)與beta公測(cè),針對(duì)不同使用場(chǎng)景的開(kāi)發(fā)者形成SIG(Special Interest Group,特別興趣小組)來(lái)定向獲取反饋,如圖1的感知場(chǎng)景開(kāi)發(fā)者訪(fǎng)談?dòng)涗洝?img class="rich_pages wxw-img" src="http://editerupload.eepw.com.cn/fetch/202308/11782be9a9a657e0199e4413f0dd3f21.png" alt="圖片" />圖1 感知仿真開(kāi)發(fā)調(diào)試場(chǎng)景SIG調(diào)研反饋此外,我們定期與社區(qū)布道師進(jìn)行深度訪(fǎng)談來(lái)進(jìn)一步收集意見(jiàn)與建議。通過(guò)這些方式,我們期望深度切入開(kāi)發(fā)者痛點(diǎn),切實(shí)解決開(kāi)發(fā)者使用中的各種問(wèn)題,讓小白開(kāi)發(fā)者從入門(mén)到精通,幫助資深開(kāi)發(fā)者快速?gòu)?到1,提升效率。通過(guò)基于場(chǎng)景的分類(lèi)和多方位的開(kāi)發(fā)者反饋收集,我們梳理了四類(lèi)核心問(wèn)題。首先,是如何高效復(fù)用工程能力?Apollo工程龐雜且與Robotaxi場(chǎng)景耦合較深,如何能快速基于Apollo的核心能力擴(kuò)展應(yīng)用到其他場(chǎng)景?需要更靈活方便的發(fā)布機(jī)制來(lái)支撐;第二,如何快速驗(yàn)證新的算法模型,滿(mǎn)足各種差異化應(yīng)用場(chǎng)景落地對(duì)于算法模型的需求,或是滿(mǎn)足科研領(lǐng)域?qū)τ谛滦退惴ǖ奶剿鳎坏谌绾翁嵘_(kāi)發(fā)調(diào)試效率?工欲善其事必先利其器,目前Apollo工具偏向整車(chē)應(yīng)用場(chǎng)景,而非個(gè)人開(kāi)發(fā)調(diào)試場(chǎng)景。開(kāi)發(fā)個(gè)人開(kāi)發(fā)者工具,縮小與個(gè)人開(kāi)發(fā)者需求之間的差距同樣非常重要。最后,如何降低學(xué)習(xí)曲線(xiàn)?提供符合開(kāi)發(fā)者學(xué)習(xí)習(xí)慣的內(nèi)容與產(chǎn)品,縮短開(kāi)發(fā)者學(xué)習(xí)過(guò)程是提升產(chǎn)品價(jià)值不可或缺的部分。接下來(lái),我們將基于以上四點(diǎn),詳細(xì)介紹最新發(fā)布的Apollo開(kāi)放平臺(tái)8.0在工程技術(shù)、算法模型、開(kāi)發(fā)工具、知識(shí)學(xué)習(xí)等方面可以為開(kāi)發(fā)者帶來(lái)哪些價(jià)值應(yīng)用。
表1 2022年上半年NPS數(shù)據(jù)同時(shí),在每次發(fā)版前,我們會(huì)進(jìn)行alpha內(nèi)測(cè)與beta公測(cè),針對(duì)不同使用場(chǎng)景的開(kāi)發(fā)者形成SIG(Special Interest Group,特別興趣小組)來(lái)定向獲取反饋,如圖1的感知場(chǎng)景開(kāi)發(fā)者訪(fǎng)談?dòng)涗洝?img class="rich_pages wxw-img" src="http://editerupload.eepw.com.cn/fetch/202308/11782be9a9a657e0199e4413f0dd3f21.png" alt="圖片" />圖1 感知仿真開(kāi)發(fā)調(diào)試場(chǎng)景SIG調(diào)研反饋此外,我們定期與社區(qū)布道師進(jìn)行深度訪(fǎng)談來(lái)進(jìn)一步收集意見(jiàn)與建議。通過(guò)這些方式,我們期望深度切入開(kāi)發(fā)者痛點(diǎn),切實(shí)解決開(kāi)發(fā)者使用中的各種問(wèn)題,讓小白開(kāi)發(fā)者從入門(mén)到精通,幫助資深開(kāi)發(fā)者快速?gòu)?到1,提升效率。通過(guò)基于場(chǎng)景的分類(lèi)和多方位的開(kāi)發(fā)者反饋收集,我們梳理了四類(lèi)核心問(wèn)題。首先,是如何高效復(fù)用工程能力?Apollo工程龐雜且與Robotaxi場(chǎng)景耦合較深,如何能快速基于Apollo的核心能力擴(kuò)展應(yīng)用到其他場(chǎng)景?需要更靈活方便的發(fā)布機(jī)制來(lái)支撐;第二,如何快速驗(yàn)證新的算法模型,滿(mǎn)足各種差異化應(yīng)用場(chǎng)景落地對(duì)于算法模型的需求,或是滿(mǎn)足科研領(lǐng)域?qū)τ谛滦退惴ǖ奶剿鳎坏谌绾翁嵘_(kāi)發(fā)調(diào)試效率?工欲善其事必先利其器,目前Apollo工具偏向整車(chē)應(yīng)用場(chǎng)景,而非個(gè)人開(kāi)發(fā)調(diào)試場(chǎng)景。開(kāi)發(fā)個(gè)人開(kāi)發(fā)者工具,縮小與個(gè)人開(kāi)發(fā)者需求之間的差距同樣非常重要。最后,如何降低學(xué)習(xí)曲線(xiàn)?提供符合開(kāi)發(fā)者學(xué)習(xí)習(xí)慣的內(nèi)容與產(chǎn)品,縮短開(kāi)發(fā)者學(xué)習(xí)過(guò)程是提升產(chǎn)品價(jià)值不可或缺的部分。接下來(lái),我們將基于以上四點(diǎn),詳細(xì)介紹最新發(fā)布的Apollo開(kāi)放平臺(tái)8.0在工程技術(shù)、算法模型、開(kāi)發(fā)工具、知識(shí)學(xué)習(xí)等方面可以為開(kāi)發(fā)者帶來(lái)哪些價(jià)值應(yīng)用。 高效復(fù)用平臺(tái)能力——包管理升級(jí)Apollo軟件包管理的主要目標(biāo)是將自動(dòng)駕駛系統(tǒng)的編譯產(chǎn)出按照“模塊”粒度進(jìn)行規(guī)范化組織,一方面支持直接使用產(chǎn)出包的方式使用組件,另一方面規(guī)范組件的依賴(lài)關(guān)系以及組件的粒度,從而降低組件的使用/復(fù)用難度,提升自動(dòng)駕駛系統(tǒng)的的研發(fā)效率。Apollo的源碼是基于Bazel進(jìn)行構(gòu)建的,其優(yōu)劣勢(shì)都很明顯,一方面得益于Bazel先進(jìn)的并行編譯速度,70W+行的源碼可以在1小時(shí)內(nèi)完成整體編譯。另一方面受限于Bazel的單源碼樹(shù)的限制,Apollo模塊之間無(wú)法使用二進(jìn)制的方式進(jìn)行依賴(lài)。Bazel包支持嵌套依賴(lài),導(dǎo)致Apollo模塊之間的依賴(lài)關(guān)系極其復(fù)雜,很難單獨(dú)使用一個(gè)或者幾個(gè)模塊。因此,Apollo包管理將基于Bazel進(jìn)行擴(kuò)展,主要規(guī)范構(gòu)建產(chǎn)出(以及部分源碼)內(nèi)容,并配套相關(guān)工具,讓Apollo的模塊可以通過(guò)二進(jìn)制的方式引入復(fù)用,因此本文介紹的概念和術(shù)語(yǔ)主要是針對(duì)Apollo的構(gòu)建產(chǎn)出。此外,Apollo的包目前對(duì)Bazel工程的支持將優(yōu)先于CMake工程,但是Apollo包最終將制作成標(biāo)準(zhǔn)的DEB包,可以安裝在Ubuntu操作系統(tǒng)上,也可以作為普通的系統(tǒng)包在CMake工程下使用。包管理的整體框架介紹Apollo的軟件包管理是一系列工具的集合,覆蓋整個(gè)軟件包的整個(gè)生命周期,如圖2所示。
高效復(fù)用平臺(tái)能力——包管理升級(jí)Apollo軟件包管理的主要目標(biāo)是將自動(dòng)駕駛系統(tǒng)的編譯產(chǎn)出按照“模塊”粒度進(jìn)行規(guī)范化組織,一方面支持直接使用產(chǎn)出包的方式使用組件,另一方面規(guī)范組件的依賴(lài)關(guān)系以及組件的粒度,從而降低組件的使用/復(fù)用難度,提升自動(dòng)駕駛系統(tǒng)的的研發(fā)效率。Apollo的源碼是基于Bazel進(jìn)行構(gòu)建的,其優(yōu)劣勢(shì)都很明顯,一方面得益于Bazel先進(jìn)的并行編譯速度,70W+行的源碼可以在1小時(shí)內(nèi)完成整體編譯。另一方面受限于Bazel的單源碼樹(shù)的限制,Apollo模塊之間無(wú)法使用二進(jìn)制的方式進(jìn)行依賴(lài)。Bazel包支持嵌套依賴(lài),導(dǎo)致Apollo模塊之間的依賴(lài)關(guān)系極其復(fù)雜,很難單獨(dú)使用一個(gè)或者幾個(gè)模塊。因此,Apollo包管理將基于Bazel進(jìn)行擴(kuò)展,主要規(guī)范構(gòu)建產(chǎn)出(以及部分源碼)內(nèi)容,并配套相關(guān)工具,讓Apollo的模塊可以通過(guò)二進(jìn)制的方式引入復(fù)用,因此本文介紹的概念和術(shù)語(yǔ)主要是針對(duì)Apollo的構(gòu)建產(chǎn)出。此外,Apollo的包目前對(duì)Bazel工程的支持將優(yōu)先于CMake工程,但是Apollo包最終將制作成標(biāo)準(zhǔn)的DEB包,可以安裝在Ubuntu操作系統(tǒng)上,也可以作為普通的系統(tǒng)包在CMake工程下使用。包管理的整體框架介紹Apollo的軟件包管理是一系列工具的集合,覆蓋整個(gè)軟件包的整個(gè)生命周期,如圖2所示。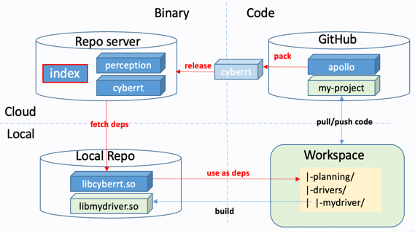 圖2 Apollo包管理框架其中包含如下模塊:RepoServer是軟件包的云端倉(cāng)庫(kù),存儲(chǔ)包實(shí)體(即deb包)與包的索引。具體實(shí)現(xiàn)是采用靜態(tài)網(wǎng)站服務(wù)結(jié)合CDN加速技術(shù)實(shí)現(xiàn)高速、高可用的文件下載服務(wù)。LocalRepo即軟件包的本地倉(cāng)庫(kù),是一個(gè)基礎(chǔ)的本地文件系統(tǒng),按照標(biāo)準(zhǔn)的文件系統(tǒng)規(guī)范存儲(chǔ)包的內(nèi)容,其中即包含從遠(yuǎn)程倉(cāng)庫(kù)下載安裝的deb包,也包括本地工程構(gòu)建產(chǎn)出的Local版本軟件包。該本地倉(cāng)庫(kù)中存儲(chǔ)的內(nèi)容有兩方面作用,一是在Apollo系統(tǒng)運(yùn)行時(shí)提供動(dòng)態(tài)鏈接庫(kù),另外也是在Apollo組件編譯時(shí)提供依賴(lài)庫(kù)。Buildtool是使用軟件包作為擴(kuò)展組件依賴(lài)時(shí)的配套構(gòu)建工具。Apollo使用Bazel作為構(gòu)建系統(tǒng),所以推薦擴(kuò)展組件也使用Bazel進(jìn)行構(gòu)建,Bazel在云端編譯、緩存等技術(shù)上有很大的優(yōu)勢(shì)。而B(niǎo)uildtool目前的底層也是基于Bazel的(未來(lái)可以考慮支持CMake等多種編譯系統(tǒng))。Buildtool的核心作用是將Apollo的軟件包作為編譯依賴(lài)加到bazel構(gòu)建體系中,而且盡量簡(jiǎn)化使用復(fù)雜度。眾所周知,將動(dòng)態(tài)庫(kù)加到Bazel的依賴(lài)體系中是比較繁瑣的,首先需要安裝動(dòng)態(tài)庫(kù),雖然Bazel中可以使用http_archive進(jìn)行下載包,但是一般情況下還是會(huì)使用Apt等工具在操作系統(tǒng)中先安裝好動(dòng)態(tài)庫(kù)。緊接著需要使new_local_repository創(chuàng)建一個(gè)repository并且提供一個(gè)BUILD文件,其中包含cc_library。在依賴(lài)包存在相互依賴(lài)的情況下,需要自行梳理版本防止依賴(lài)沖突。Buildtool通過(guò)依賴(lài)版本分析、自動(dòng)拉取依賴(lài)包、自動(dòng)生成repository配置、自動(dòng)處理級(jí)聯(lián)依賴(lài)等功能配合包描述文件(cyberfile.xml),可以讓上述繁瑣過(guò)程對(duì)使用者透明,只需要在包描述中聲明一個(gè)依賴(lài)即可。Buildtool的第二個(gè)作用是支持源碼方式使用Apollo的軟件包。C++使用二進(jìn)制作為依賴(lài)一直存在ABI等問(wèn)題難以解決,所以在Apollo的軟件包中將源碼也作為標(biāo)準(zhǔn)內(nèi)容,Buildtool支持將包的源碼自動(dòng)引入到使用者的工作空間下參與編譯,與此同時(shí)Buildtool也將多個(gè)源碼包的編譯順序納入管理。除了在構(gòu)建中使用Buildtool下載安裝使用,也可以使用Apt等工具直接安裝使用,例如在使用Dreamview播放Record文件的場(chǎng)景下我們不需要從頭編譯Apollo工程,只需要使用apt installapollo-neo-dreamview-dev,將dreamview以及其依賴(lài)按照到本地就可以來(lái)播放數(shù)據(jù)包回看數(shù)據(jù)了。軟件包管理的各個(gè)組成部分已經(jīng)介紹完了。可以看出其全部功能都跟無(wú)人駕駛系統(tǒng)本身沒(méi)有關(guān)系,那它對(duì)于Apollo的發(fā)展有什么作用呢?Apollo開(kāi)源項(xiàng)目是一整套完整的無(wú)人駕駛系統(tǒng),但是由于業(yè)務(wù)場(chǎng)景不同,具體分場(chǎng)景下開(kāi)發(fā)者不會(huì)直接部署一整套項(xiàng)目,而是從中選取適合自己的功能、算法等內(nèi)容放到自己的項(xiàng)目中使用。而目前Monolithic Repository的組織結(jié)構(gòu),各個(gè)功能組件之間存在耦合,要抽離出來(lái)單獨(dú)使用的成本很大,所以很多開(kāi)發(fā)者會(huì)自己再重新實(shí)現(xiàn)一份代碼。但這樣不但浪費(fèi)開(kāi)發(fā)者的時(shí)間成本,也會(huì)導(dǎo)致開(kāi)發(fā)者的擴(kuò)展內(nèi)容無(wú)法進(jìn)行貢獻(xiàn)。有了軟件包管理后,一方面先進(jìn)技術(shù)可以按照功能模塊的粒度以二進(jìn)制庫(kù)(或者源碼)的方式被開(kāi)發(fā)者直接使用,同時(shí)也為開(kāi)發(fā)者提供了更輕量級(jí)并且和Apollo龐大的單體源碼解耦的方式來(lái)共享自己的擴(kuò)展能力,即按照Apollo軟件包的規(guī)范開(kāi)發(fā)/發(fā)布自己的軟件包,為Apollo自動(dòng)駕駛系統(tǒng)生態(tài)的健康發(fā)展奠定了基礎(chǔ)。
圖2 Apollo包管理框架其中包含如下模塊:RepoServer是軟件包的云端倉(cāng)庫(kù),存儲(chǔ)包實(shí)體(即deb包)與包的索引。具體實(shí)現(xiàn)是采用靜態(tài)網(wǎng)站服務(wù)結(jié)合CDN加速技術(shù)實(shí)現(xiàn)高速、高可用的文件下載服務(wù)。LocalRepo即軟件包的本地倉(cāng)庫(kù),是一個(gè)基礎(chǔ)的本地文件系統(tǒng),按照標(biāo)準(zhǔn)的文件系統(tǒng)規(guī)范存儲(chǔ)包的內(nèi)容,其中即包含從遠(yuǎn)程倉(cāng)庫(kù)下載安裝的deb包,也包括本地工程構(gòu)建產(chǎn)出的Local版本軟件包。該本地倉(cāng)庫(kù)中存儲(chǔ)的內(nèi)容有兩方面作用,一是在Apollo系統(tǒng)運(yùn)行時(shí)提供動(dòng)態(tài)鏈接庫(kù),另外也是在Apollo組件編譯時(shí)提供依賴(lài)庫(kù)。Buildtool是使用軟件包作為擴(kuò)展組件依賴(lài)時(shí)的配套構(gòu)建工具。Apollo使用Bazel作為構(gòu)建系統(tǒng),所以推薦擴(kuò)展組件也使用Bazel進(jìn)行構(gòu)建,Bazel在云端編譯、緩存等技術(shù)上有很大的優(yōu)勢(shì)。而B(niǎo)uildtool目前的底層也是基于Bazel的(未來(lái)可以考慮支持CMake等多種編譯系統(tǒng))。Buildtool的核心作用是將Apollo的軟件包作為編譯依賴(lài)加到bazel構(gòu)建體系中,而且盡量簡(jiǎn)化使用復(fù)雜度。眾所周知,將動(dòng)態(tài)庫(kù)加到Bazel的依賴(lài)體系中是比較繁瑣的,首先需要安裝動(dòng)態(tài)庫(kù),雖然Bazel中可以使用http_archive進(jìn)行下載包,但是一般情況下還是會(huì)使用Apt等工具在操作系統(tǒng)中先安裝好動(dòng)態(tài)庫(kù)。緊接著需要使new_local_repository創(chuàng)建一個(gè)repository并且提供一個(gè)BUILD文件,其中包含cc_library。在依賴(lài)包存在相互依賴(lài)的情況下,需要自行梳理版本防止依賴(lài)沖突。Buildtool通過(guò)依賴(lài)版本分析、自動(dòng)拉取依賴(lài)包、自動(dòng)生成repository配置、自動(dòng)處理級(jí)聯(lián)依賴(lài)等功能配合包描述文件(cyberfile.xml),可以讓上述繁瑣過(guò)程對(duì)使用者透明,只需要在包描述中聲明一個(gè)依賴(lài)即可。Buildtool的第二個(gè)作用是支持源碼方式使用Apollo的軟件包。C++使用二進(jìn)制作為依賴(lài)一直存在ABI等問(wèn)題難以解決,所以在Apollo的軟件包中將源碼也作為標(biāo)準(zhǔn)內(nèi)容,Buildtool支持將包的源碼自動(dòng)引入到使用者的工作空間下參與編譯,與此同時(shí)Buildtool也將多個(gè)源碼包的編譯順序納入管理。除了在構(gòu)建中使用Buildtool下載安裝使用,也可以使用Apt等工具直接安裝使用,例如在使用Dreamview播放Record文件的場(chǎng)景下我們不需要從頭編譯Apollo工程,只需要使用apt installapollo-neo-dreamview-dev,將dreamview以及其依賴(lài)按照到本地就可以來(lái)播放數(shù)據(jù)包回看數(shù)據(jù)了。軟件包管理的各個(gè)組成部分已經(jīng)介紹完了。可以看出其全部功能都跟無(wú)人駕駛系統(tǒng)本身沒(méi)有關(guān)系,那它對(duì)于Apollo的發(fā)展有什么作用呢?Apollo開(kāi)源項(xiàng)目是一整套完整的無(wú)人駕駛系統(tǒng),但是由于業(yè)務(wù)場(chǎng)景不同,具體分場(chǎng)景下開(kāi)發(fā)者不會(huì)直接部署一整套項(xiàng)目,而是從中選取適合自己的功能、算法等內(nèi)容放到自己的項(xiàng)目中使用。而目前Monolithic Repository的組織結(jié)構(gòu),各個(gè)功能組件之間存在耦合,要抽離出來(lái)單獨(dú)使用的成本很大,所以很多開(kāi)發(fā)者會(huì)自己再重新實(shí)現(xiàn)一份代碼。但這樣不但浪費(fèi)開(kāi)發(fā)者的時(shí)間成本,也會(huì)導(dǎo)致開(kāi)發(fā)者的擴(kuò)展內(nèi)容無(wú)法進(jìn)行貢獻(xiàn)。有了軟件包管理后,一方面先進(jìn)技術(shù)可以按照功能模塊的粒度以二進(jìn)制庫(kù)(或者源碼)的方式被開(kāi)發(fā)者直接使用,同時(shí)也為開(kāi)發(fā)者提供了更輕量級(jí)并且和Apollo龐大的單體源碼解耦的方式來(lái)共享自己的擴(kuò)展能力,即按照Apollo軟件包的規(guī)范開(kāi)發(fā)/發(fā)布自己的軟件包,為Apollo自動(dòng)駕駛系統(tǒng)生態(tài)的健康發(fā)展奠定了基礎(chǔ)。*博客內(nèi)容為網(wǎng)友個(gè)人發(fā)布,僅代表博主個(gè)人觀點(diǎn),如有侵權(quán)請(qǐng)聯(lián)系工作人員刪除。





