機械手超越人類觸感?MIT最新研究讓機械手只需輕輕一抓就能識別物體!

如果和機械手一起玩“摸箱子”游戲,你有信心能贏么?

先別盲目自信,論誰更會“摸”,機械手說不定更勝一籌,因為它的「類人觸感技術」最近又又又進化了!
別看它只有3根手指頭,僅需要抓握一次,這只機械手就能識別出手中的物體是什么,準確率可達85%!
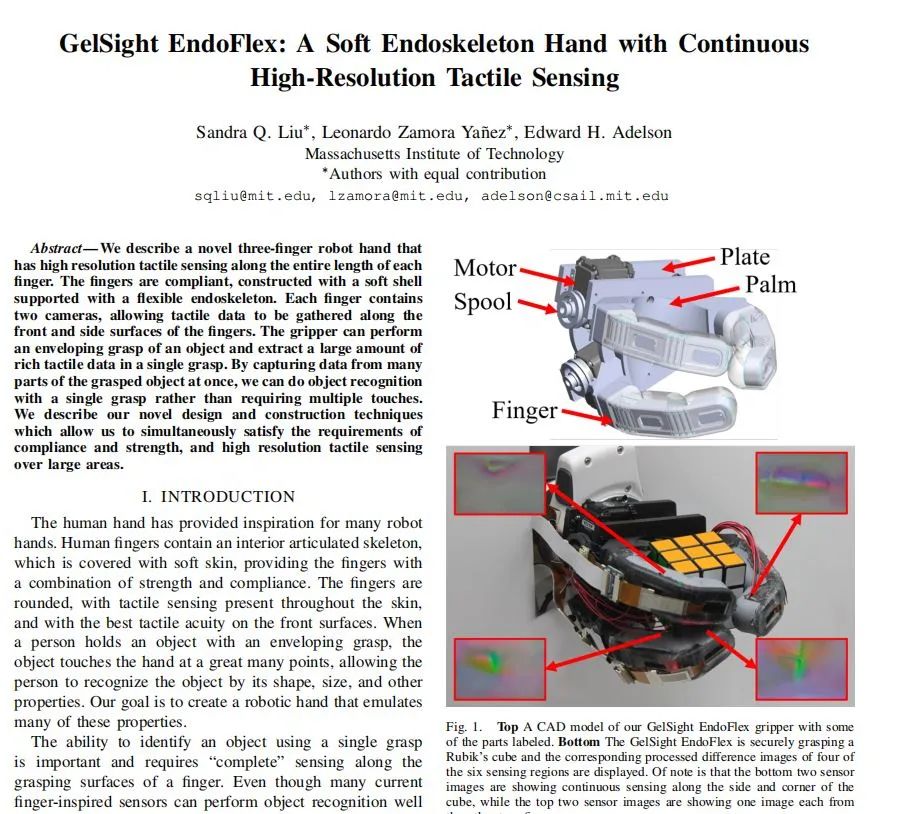
這是MIT最新研究成果,他們在其透明“皮膚”下集成了多個高分辨率傳感器,使用攝像頭和LED來收集物體形狀的視覺信息,沿著手指提供連續感應,一次抓取后就能識別物體,小手一握,盡在掌握!
▍全手指集成高分辨率傳感器
具有觸覺的機械手不在少數,它們要么把傳感器安裝在指尖中,需要和物體完全接觸才能感知;要么將低分辨率傳感器分布在整個手指上,通常需要多次抓握才能捕獲信息。
這讓機械手的觸覺感知顯得有些“遲鈍”。
相比之下,MIT的機械手具有極高的敏感度,那它到底是怎么做到的?
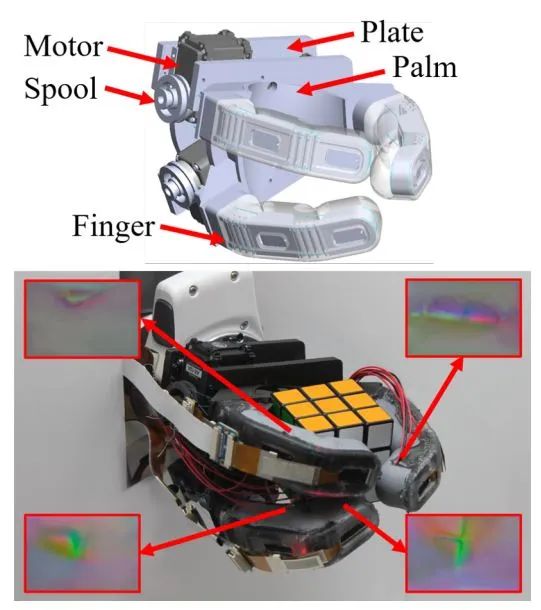
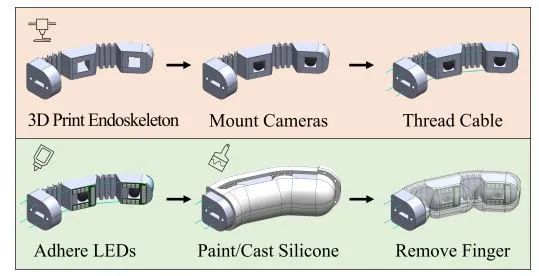
我們先從機械手的設計講起,它結合了剛性和柔性設計,既“強壯”又“溫柔”,指骨由3D打印的剛性內骨骼組成,包裹在透明的硅膠“皮膚”里,這種設計讓它可以輕松拿起重物,柔軟的皮膚也給交互帶來更多安全感。
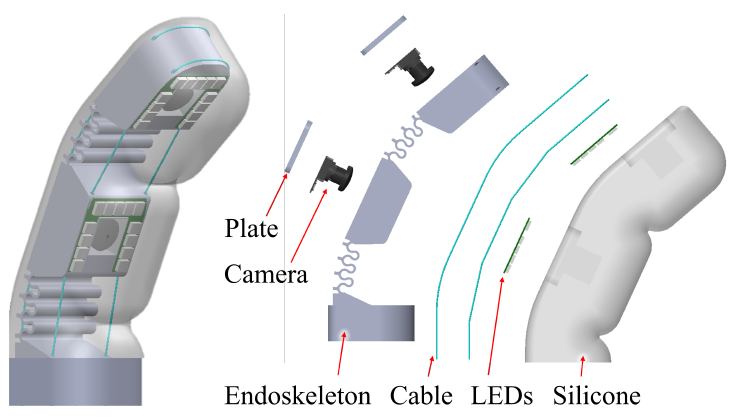
其中,每個手指的剛性內骨骼都由可彎曲的關節和指骨組成:
 (每個手指獨立操作,具有一個自由度,如果損壞可以快速更換)
(每個手指獨立操作,具有一個自由度,如果損壞可以快速更換)
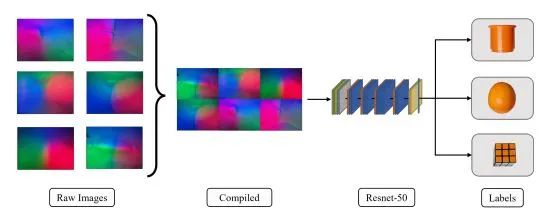
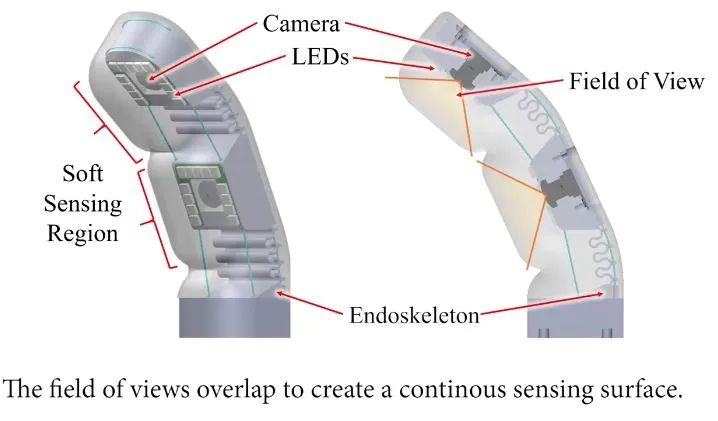
每段指骨內嵌入了一對精細的觸摸傳感器,稱為GelSight 傳感器,由一個攝像頭和三個彩色 LED 組成。這里的攝像頭并不是讓機械手去“看”物體,而是利用彩色 LED 從內部照亮皮膚,相機來捕捉物體的大致輪廓圖像。
當圖像的照明輪廓出現在皮膚上時,一種算法執行反向計算將輪廓映射到所抓物體的表面上。研究人員訓練了一個機器學習模型,以使用原始相機圖像數據識別物體。
更妙的是,雖然研發團隊只在每段指骨中嵌入了攝像機,但手指可以彎曲呀,當它彎曲的時候相機的范圍能夠略微重疊,這樣就實現了整個手指長度的連續感應!
而機械手雖然只有3根手指,但每一根的作用都不多不少剛剛好:其中兩根手指以 Y 型排列,第三根手指作為輔助的拇指,當它抓住物體時,手會捕捉六張圖像(每個手指兩張),并將這些圖像發送到機器學習算法來識別物體。結合每根手指的連續觸覺感應,它可以從一次抓握中收集豐富的觸覺數據!
▍意外收獲——皺紋讓硅膠皮膚壽命更長
機械手的設計過程也并不是那么順利的,在對機械手進行測試時,研發團隊發現:機械手的硅膠皮膚會隨著時間的推移從表面剝落。
但同時,他們還有個意外收獲——添加皺紋可以增加機械手壽命!

最初,為了解決硅膠剝落的問題,研發團隊在內骨骼關節中增加了曲線設計,這樣可以在手指彎曲時分擔硅膠皮膚的壓力;他們還在關節上增加了折痕,這樣當手指彎曲時硅膠就不會被壓扁。
這一切都是為了防止硅膠表面起皺,但隨后他們發現:在手指表面制造的皺紋,有助于防止硅膠膜上的撕裂!
和光滑的硅膠皮膚相比,皺紋有助于減輕由尖角進入傳感器表面而造成的高應力點。有皺紋的表面也比光滑的表面摩擦更小。雖然皺紋會出現在傳感器圖像中,導致表面重建困難,但它完全沒有對物體分類結果產生影響。
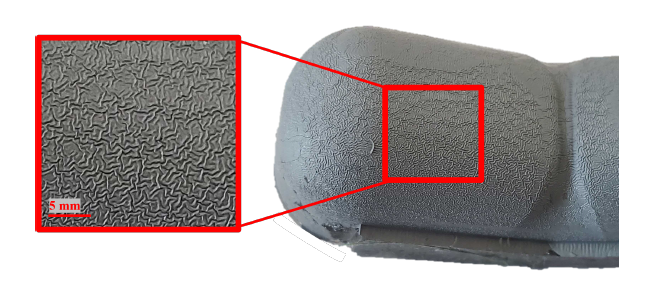
“皺紋的用處是我們的一個偶然發現。當我們在表面合成它們時,我們發現它們實際上使手指比我們預期的更耐用,”MIT的研究人員表示。
GelSight EndoFlex 傳感器網狀皺紋表面的特寫圖像。其中一條皺紋的寬度約為 0.4 毫米,是我們在模具表面噴上油漆,然后再將硅膠澆注到內部時才形成的。
▍進一步研發感知手掌
這項研究的第一作者是MIT的機械工程博士生Sandra Liu,她目前在Edward Adelson 教授領導的感知科學小組中進行研究工作。該研究將在 RoboSoft 會議上展示。
這項研究為機械手的發展帶來了新的可能性,一次抓握精準識別大大提升了速度和效率,“我們的目標是將人手的功能盡可能賦予給機器人,它可以完成其他機器人手指目前無法完成的任務,”Sandra Liu說:“未來我們考慮進一步研發具有感應功能的手掌,更好地進行觸覺區分。”
未來,研究人員還希望改進硬件,以減少硅膠隨時間的磨損量,并為拇指增加更多的驅動力,使其能夠執行更廣泛的任務。
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。