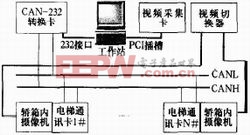
- 介紹應用了CAN總線的電梯遠程監控系統的組成結構及功能,詳細描述了基于CAN總線的數據傳輸模塊的工作方式以及過程,同時,還詳細的介紹了CAN總線的功能特點及其控制器的功能。
- 關鍵字:
監控系統 應用 遠程 電梯 總線 CAN CAN
- 根據白車身視覺檢測站工作的過程和特點,研究了基于CAN總線的多主結構分布控制系統,提出了以采用摩托羅拉MC68HC05X16和微機為主機的控制系統。文中對控制網絡的物理層接口、拓撲結構、通信協議等作了較為詳細的說明。
- 關鍵字:
CAN 總線 車身 視覺檢測

- 美國國家儀器有限公司(National Instruments,簡稱NI)近日最新推出NI-XNET CAN和FlexRay嵌入式網絡接口,這將有助于汽車、航空航天等領域的工程師快速完成原型化、模擬和測試下一代FlexRay和控制器局域網(CAN)設備和網絡。
- 關鍵字:
NI FlexRay CAN 接口
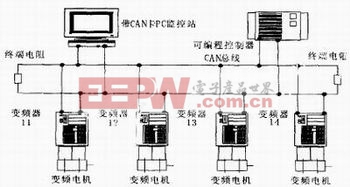
- 提出基于CAN總線,通過Lenze矢量型變頻器組控制分布式多臺電機的調速方案。該方案適合化工生產中生產工藝的特殊要求,即一條生產線需要使用不同種類的傳送帶,傳送帶之間的運行線速度要求誤差小,在生產線加、減速過程中,要求各段傳送帶動態同步性能好的控制領域。經過設計、調試實現了系統控制目標。運行結果達到設計要求。
- 關鍵字:
同步 控制系統 電機 分布式 CAN 總線 基于 CAN
- 文中提出了一種基于CAN總線的水下機器人分布式控制系統結構,主要設計其執行節點,包括P87C591單片機為核心的的硬件電路和軟件結構設計。
- 關鍵字:
CAN 總線 水下機器人 節點設計
- 介紹了一種基于ADE7755的帶CAN總線的工業用電量計量方案。為了實現能夠適應運行環境惡劣的工業場合應用的目的,結合ADE7755本身的抗干擾性,搭建了ADE7755的外圍電路和相應的濾波電路。通過搭建P87C591外圍電路和CAN總線收發電路,實現了數據采集、電量運算和利用CAN總線實現機間通信的功能。通過電源部分電路的搭建,實現了給系統提供+5V和+2.5V基準電源。除提供了上述各部分的硬件電路外,還給出了CAN總線的初始化程序。在經過了實驗室試驗后,利用本方案制成的電度表正在電力機車上進行進一步的
- 關鍵字:
7755 ADE CAN 總線
- 通過對五維力/力矩傳感器的電路結構和已經建立的仿人機器人運動控制系統結構分析,提出了一種基于CAN總線的力信息檢測系統。主要介紹了設計思想和方案,對接口電路設計的硬件結構和軟件流程進行了詳細的闡述。所設計的系統已應用于仿人機器人的力信息采集,通過實驗證明能夠較好地完成力信息的實時采集與傳送。
- 關鍵字:
CAN 總線 仿人機器人 信息檢測
- 本文闡述了CAN現場總線、總線接口技術、時間信息提取電路結構、信息無線發送結構等原理,及如何利用CAN現場總線技術實現時間信息共享技術。
- 關鍵字:
CAN 現場總線 信息共享
- 針對當前列車行程記錄方式比較落后的狀況,采用GSM、CAN總線和GPS技術,設計了一個能夠自動記錄列車行駛里程的網絡系統,并給出了系統的軟件和硬件設計。本系統解決了現有列車行程記錄方式存在的弊端,為列車行程的測量和管理提供了一種新方法。通過大量實驗得出,當列車的行駛速度大于10km/h時,行程測量的相對誤差小于2%。
- 關鍵字:
GSM GPS CAN 總線
- 介紹了一種基于CAN 總線的塑窗焊接清理生產線控制系統。論述了CAN 總線的特性和設計應用、系統的硬件結構,控制原理等。由于采用全數字CAN 網絡技術,數據傳輸安全準確、系統穩定可靠。
- 關鍵字:
生產線 控制系統 清理 焊接 CAN 總線 基于 CAN
- 介紹CAN總線基本原理和新型燃料電池汽車空調控制系統結構,給出了一種由通用微控制器和數字信號處理器以及獨立CAN控制器構成的燃料電池汽車空調控制系統,并對控制節點的軟、硬件設計進行了分析.實踐證明該系統有可靠、靈活、性價比高等特點,完全滿足系統開發要求.
- 關鍵字:
CAN 總線 燃料電池 汽車
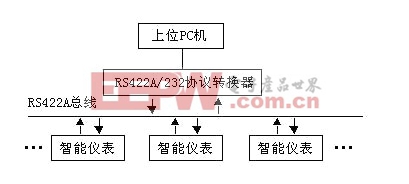
- 本文簡要介紹在某工程項目中采用RS422A總線組建實現遠程雙向數據通信的溫控網絡系統的系統結構及通信協議,著重敘述了使用VC++6.0多線程技術的實時監控通信軟件的編寫。該系統運行穩定可靠,充分發揮了網絡管理的便捷優點,提高了生產效率。
- 關鍵字:
網絡 控制系統 溫控 總線 RS422A 現場 基于 CAN
- CAN總線技術的引入徹底改變了工程機械控制領域的面貌,分布式控制系統完全取代了集中式控制系統,在眾多具有CAN功能的控制器、傳感器和執行器的支持下,繁瑣的現場連線被單一、簡潔的現場總線網絡所替代,系統設計更加靈活、信號傳輸質量也大幅提高。
- 關鍵字:
領域 應用 控制 工程機械 技術 CAN CAN
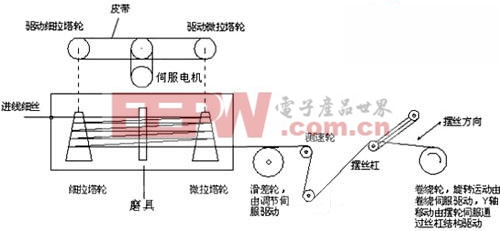
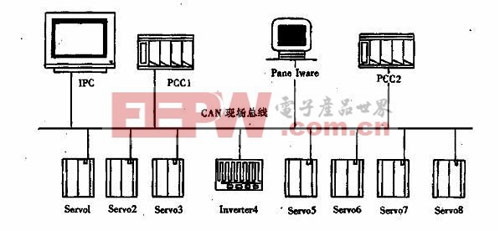
- 拉絲機系統是一個對速度的控制要求高的一種機械設備,要求控制系統能夠提供非常精確、平滑的線速度。我們所做的這套系統是用來拉金絲的,因此系統的各方面要求更高。整個系統比較復雜,控制設備繁多,各個電機之間要求很高的協調性,該系統采用4套伺服電機控制,而每套伺服電機間均有數據交換,且數據通訊也要求很強的實時性,也就是要求系統具有總線通訊能力。這樣就要求伺服驅動器擁有非常強大的功能才能滿足控制要求。
- 關鍵字:
機上 應用 拉絲 解決方案 總線 CAN CAN
can-ethernet介紹
您好,目前還沒有人創建詞條can-ethernet!
歡迎您創建該詞條,闡述對can-ethernet的理解,并與今后在此搜索can-ethernet的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473