CAN總線解決方案在拉絲機上的應用

1、全數字化的速度和位置控制功能,并提供位置、速度和扭矩的控制功能;
本文引用地址:http://www.104case.com/article/163602.htm2、靈活多變的跟蹤控制方式,提供高靈敏度的跟蹤效果;
3、可編程控制的數字輸入輸出;
4、可監控電機短路、電壓、溫度、編碼器、位置跟蹤和電流過高等故障;
5、可通過RS232、RS485、Profibus、CAN通訊口進行參數設定;
因此我們的伺服驅動器完全有能力勝任這份工作,下面大致介紹下這套系統:
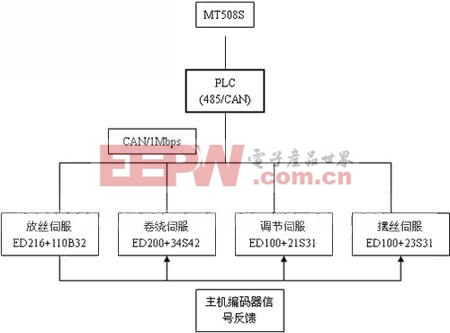
一、系統框圖
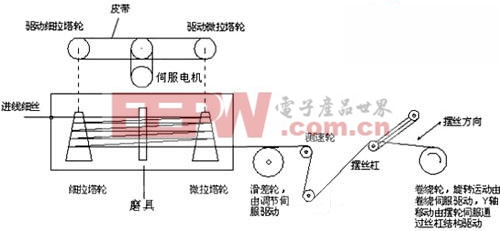
二、工藝流程
1、未拉的絲通過一個阻力裝置(主要是一個夾板之類的東西,它用來提供一定的張力,同時也起到了防止線跳的作用),然后進入細拉槽;
2、進入細拉槽的絲在細拉塔輪和微拉塔輪的多次拉制后,成為所需要的絲(兩個塔輪間的隔板安放了一個磨具,這個磨具的形狀是“〕”,即一邊孔大一邊孔細);
3、拉細后的絲經過滑差輪,這個輪的作用主要是保持恒定張力;
4、然后絲在經過測速論,這個輪的作用就是測出當前絲的線速度;
5、經過測速輪的絲再經過一個中間環節,然后通過擺絲桿,最后把絲繞到卷軸上;
三、系統控制方案
整個系統要求的控制方案主要有以下4個:
1、放絲伺服的恒線速度控制;
2、調節伺服的跟隨控制;
3、卷繞伺服的恒線速度(恒張力)控制,即要求卷繞伺服在半徑不斷增大的情況下保持與調節伺服的線速度相等;
4、擺絲伺服的位置控制;
因為該系統要求具有總線通訊能力,因此我們在這里選擇了我們公司的K4系列帶CAN總線的PLC,該PLC采用了標準的CANopen協議,能夠傳送和接收PDO、SDO,而我們的伺服驅動器也自帶了CAN接口,也采用了標準的CANopen協議。這樣該方案就就滿足了系統對實時通訊數據的要求(CAN總線的通訊速率最高可達1M/S).我們的驅動器也集成了PROFIBUS接口,但是擁有PROFIBUS的PLC不多,而且價格也比較昂貴,采用CAN總線即滿足了控制要求,又為客戶節約了成本。
四、控制方案介紹
1、放絲伺服的恒線速度控制
該伺服電機的控制采用帶加減速的控制模式(3模式)來完成。對于該系統來說,要求主軸放絲電機能夠最大程度上抗干擾,能夠盡量在一個穩定的速度下運行,同時還要具備平滑的加減速功能。因為系統在啟動開始時,要以一個比較低的速度來運行(60R/MIN),然后操作人員在HMI上通過總線把電機手動加速到合適速度(500R/MIN)才開始拉絲,同時在停機的時候也要求電機能夠平滑的把速度降下來。驅動器工作在3模式下擁有非常穩定、精確的速度控制能力,完全能夠滿足上述要求。
小結:PLC通過CAN總線傳送速度、加速度命令到拉絲伺服,從而實現拉絲電機平穩運行;
2、調節伺服的跟隨控制
該伺服電機的控制采用跟隨控制模式(-4模式)來完成。對于該電機來說,這個電機要完全跟隨放絲電機來運行,如果跟隨時速度出現了大的偏差,那么絲就會被拉斷,這樣的結果是不允許的!同時該電機的線速度還要求在放絲電機線速度的上下波動,速度波動的范圍要在±5%之間可調,這樣做的目的是調節絲的張力大小,從而調節絲繞到卷繞輪的張力大小。而驅動器工作在-4模式下時,擁有非常精確、靈敏的速度跟隨性,也就是該電機完全隨著放絲電機的運行,一起相互加減速、勻速運行。電機的運行速度隨著從X7輸入脈沖的頻率變化而變化,另外輸入脈沖的頻率經過齒輪比后才得到了真正的電機實際要運行的頻率,通過更改齒輪比來實現線速度在±5%之間波動。

伺服電機相關文章:伺服電機工作原理










評論