EEPW首頁(yè) >>
主題列表 >>
算法
算法 文章 最新資訊
基于DPCM算法的測(cè)井?dāng)?shù)據(jù)壓縮
- 摘要:由于現(xiàn)實(shí)中測(cè)井?dāng)?shù)據(jù)數(shù)據(jù)量大,數(shù)據(jù)傳輸實(shí)時(shí)性強(qiáng),這就要求傳輸效率要盡可能地高。但是目前大多數(shù)油田仍采用直接傳輸采樣數(shù)據(jù)的方式。因此提出了一種基于DPCM算法的測(cè)井?dāng)?shù)據(jù)傳輸方式。針對(duì)編碼方式的特點(diǎn),設(shè)計(jì)
- 關(guān)鍵字: DPCM 算法 測(cè)井 數(shù)據(jù)壓縮

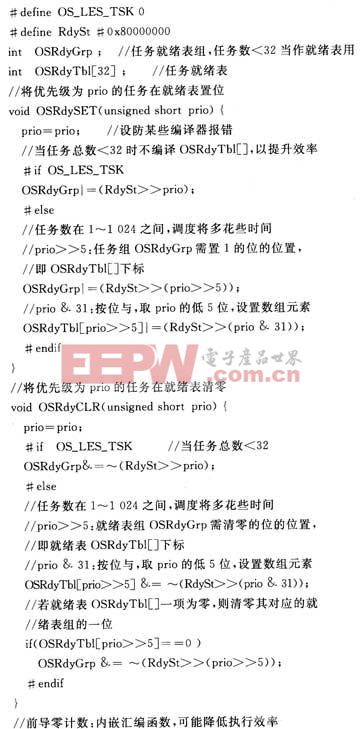
ARM9高速實(shí)時(shí)多任務(wù)數(shù)據(jù)采集系統(tǒng)的算法優(yōu)化
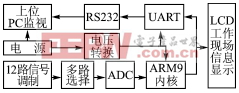
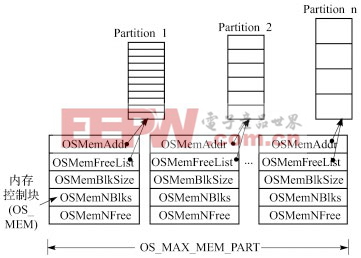
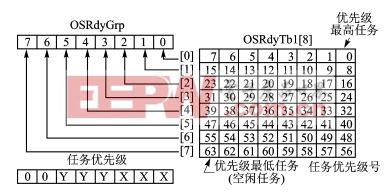
- ARM9高速實(shí)時(shí)多任務(wù)數(shù)據(jù)采集系統(tǒng)的算法優(yōu)化,摘要: 針對(duì)高速實(shí)時(shí)多任務(wù)數(shù)據(jù)采集系統(tǒng)的高速性、實(shí)時(shí)性、并發(fā)性、安全性要求,提出了基于ARM9和mu;C/OSII操作系統(tǒng)的多頻道數(shù)據(jù)采集系統(tǒng)的智能化設(shè)計(jì)方案。實(shí)現(xiàn)了任務(wù)優(yōu)先級(jí)動(dòng)態(tài)調(diào)度、動(dòng)態(tài)設(shè)置、系統(tǒng)工作參數(shù)動(dòng)態(tài)設(shè)
- 關(guān)鍵字: 系統(tǒng) 算法 優(yōu)化 數(shù)據(jù)采集 任務(wù) 高速 實(shí)時(shí) ARM9
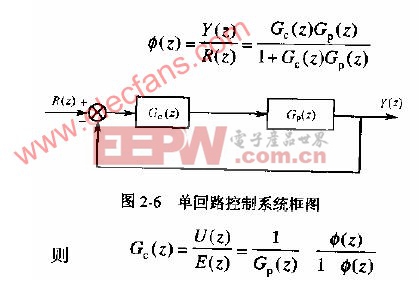
無(wú)刷直流電動(dòng)機(jī)的模糊邏輯算法控制
- 越來(lái)越多企業(yè)開始使用變速驅(qū)動(dòng)發(fā)動(dòng)機(jī)來(lái)減少能源的消耗。這需要通過從微分(PID)控制器轉(zhuǎn)向基于模糊邏輯算法的系統(tǒng)來(lái)簡(jiǎn)化設(shè)計(jì),縮短開發(fā)時(shí)間,并消除復(fù)雜的數(shù)學(xué)公式。但是,這對(duì)發(fā)動(dòng)機(jī)提出了新的挑戰(zhàn)。當(dāng)使用傳統(tǒng)的積分
- 關(guān)鍵字: 無(wú)刷直流電動(dòng)機(jī) 模糊邏輯 算法

G.723.1標(biāo)準(zhǔn)算法在DSP上的優(yōu)化
- G.723.1標(biāo)準(zhǔn)算法在DSP上的優(yōu)化,1 引言 G.723.1是刪組織于1996年推出的一種低碼率的語(yǔ)音編碼算法標(biāo)準(zhǔn),也是目前該組織頒布的語(yǔ)音壓縮標(biāo)準(zhǔn)中碼率最低的一種標(biāo)準(zhǔn)。G.723.1主要用于對(duì)語(yǔ)音及其它多媒體聲音信號(hào)的壓縮,目前在一些數(shù)字音視頻傳輸、高
- 關(guān)鍵字: 優(yōu)化 DSP 算法 標(biāo)準(zhǔn) G.723.1
嵌入式定位系統(tǒng)的實(shí)用設(shè)計(jì)與軟件算法實(shí)現(xiàn)
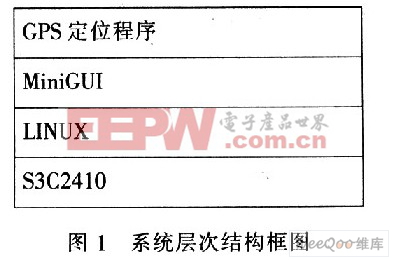
- 嵌入式定位系統(tǒng)的實(shí)用設(shè)計(jì)與軟件算法實(shí)現(xiàn),定位系統(tǒng)自問世后便得到了蓬勃發(fā)展,其應(yīng)用已滲入到各行各業(yè)。個(gè)人消費(fèi)領(lǐng)域引領(lǐng)移動(dòng)定位類型科技產(chǎn)品集中涌現(xiàn),其他領(lǐng)域和行業(yè)也有大量技術(shù)更新。目前各領(lǐng)域的定位系統(tǒng)主要集中在平臺(tái)和地圖的研發(fā)上,平臺(tái)配合應(yīng)用要
- 關(guān)鍵字: 軟件 算法 實(shí)現(xiàn) 設(shè)計(jì) 實(shí)用 定位 系統(tǒng) 嵌入式
算法介紹
算法(Algorithm)是一系列解決問題的清晰指令,也就是說(shuō),能夠?qū)σ欢ㄒ?guī)范的輸入,在有限時(shí)間內(nèi)獲得所要求的輸出。如果一個(gè)算法有缺陷,或不適合于某個(gè)問題,執(zhí)行這個(gè)算法將不會(huì)解決這個(gè)問題。不同的算法可能用不同的時(shí)間、空間或效率來(lái)完成同樣的任務(wù)。一個(gè)算法的優(yōu)劣可以用空間復(fù)雜度與時(shí)間復(fù)雜度來(lái)衡量。
算法可以理解為有基本運(yùn)算及規(guī)定的運(yùn)算順序所構(gòu)成的完整的解題步驟。或者看成按照要求設(shè)計(jì)好的有限的確切 [ 查看詳細(xì) ]
算法電路



算法相關(guān)帖子
算法資料下載
算法專欄文章
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會(huì)員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機(jī)EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢有限公司
 京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢有限公司