- RX26T產品群是RX24T/RX24U的后繼產品,于今年2023年5月開始量產,非常適用于雙電機+PFC控制。若您正在尋找針對電機/逆變器控制的更高性能/更多功能的單片機,那么絕對不容錯過。RX26T(RAM48KB)產品新增了48pin LFQFP/64pin LFQFP這兩種封裝選項,以及128KB/256KB的Flash內存大小。RX26T產品陣容圖近年來,在需要電機/逆變器控制的應用中,一方面需要支持IoT技術等,另一方面,我們也從長期使用RX24T的客戶那里收到了大量反饋關于專門針對單電機+P
- 關鍵字:
RX26T 評估套件 單片機 IoT
- 業界領先的半導體器件供應商兆易創新GigaDevice (股票代碼 603986) 今日宣布,正式推出基于RISC-V內核的GD32VW553系列雙模無線微控制器。GD32VW553系列MCU支持Wi-Fi 6及Bluetooth LE 5.2無線連接,以先進的射頻集成、強化的安全機制、大容量存儲資源以及豐富的通用接口,結合成熟的工藝平臺及優化的成本控制,為需要高效無線傳輸的市場應用持續提供解決方案。全新產品組合提供了8個型號、QFN40/QFN32兩種小型封裝選項,現已開放樣片和開發板卡申請,并將于12
- 關鍵字:
兆易創新 RISC-V GD32VW553 雙模 無線 微控制器
- 意法半導體發布了一款功能豐富的STM32H5微控制器(MCU)開發板。STM32H5微控制器是開發高性能數據處理和高級安全應用的理想選擇,適合開發各種應用,例如,智能傳感器、智能家電、工業控制器、網絡設備、個人電子產品和醫療設備。STM32H573I-DK探索套件讓開發人員能夠探索STM32H5集成的全部功能,例如,模擬外設、定時器、ST ART(自適應實時)加速器?、媒體接口和數學加速器,方便開發者評估工業可編程邏輯控制器(PLC)、電機驅動器,以及空調、冰箱和洗衣機等家電的智能控制器的新設計,其他潛在
- 關鍵字:
意法半導體 微控制器 STM32H5
- 一般來說,按下記分板上的按鈕后,數字顯示器就會顯示分數。該記分板的主要核心是兩位數的上下限計數器電路。這兩位數顯示在兩個 7 段顯示器上。在本項目中,我將向您展示如何使用 8051 微控制器和 ATmega8 微控制器構建 2 位數上下限計數器電路。兩位數升位降位計數器電路原理兩位數升降計數器電路的主要原理是通過按下按鈕來遞增七段顯示器上的數值。按下 1 號按鈕時,顯示屏上的數值遞增 1;按下另一個按鈕時,顯示屏上的數值遞減 1。顯示屏上的數值可以在 0-99 之間遞增或遞減,因為它只使用 2 個顯示屏。
- 關鍵字:
計數器 8051 微控制器
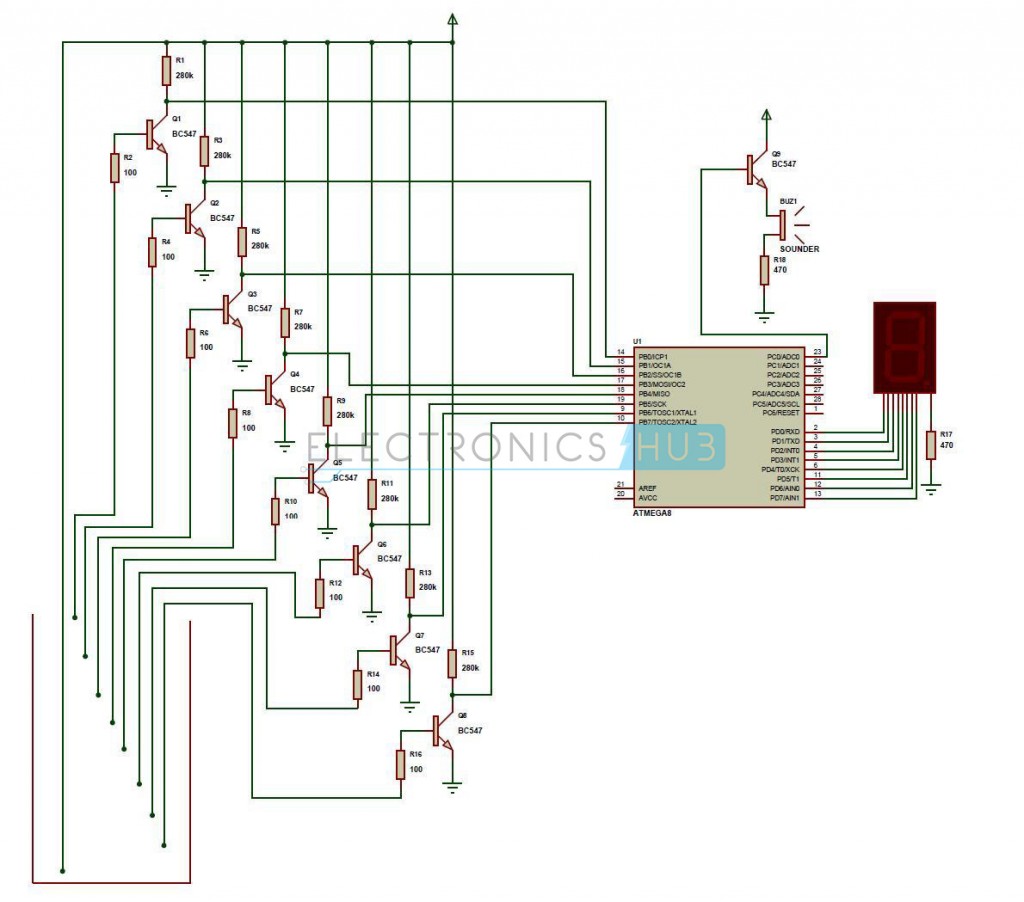
- 在本項目中,我將向您展示一個使用微控制器 (8051) 的 8 通道測驗蜂鳴器電路的設計和工作原理,它可以告訴我們在測驗或游戲節目中哪個團隊先按下了按鈕。測驗蜂鳴器常用于教育機構和游戲節目等場所,組織者需要知道誰先按下按鈕。傳統的系統需要人工干預來決定哪個小組先按下按鈕,而這種系統可能會出現錯誤,甚至有偏差。另一個問題是,當兩名成員按下按鈕的時間間隔微乎其微,很難猜出誰先按下蜂鳴器。在這個項目中,我設計了一個自動搶答蜂鳴器系統,當不止一個小組按下蜂鳴器時,兩個按鈕按下之間的延遲會被準確地考慮在內,并顯示相
- 關鍵字:
微控制器 8通道 蜂鳴器
- 在本系列的前一篇文章中,我們研究了理想化的數字世界與我們必須設計的現實世界之間的差異,并研究了我們需要管理的各種類型的噪聲。本篇我們將看看我們可能遇到的一些典型的噪聲源。這些來源既可以是我們系統的外部,也可以是內部的。外部噪聲源通常是系統可靠運行的最大威脅之一,我們必須在環境中管理許多噪聲源。這些可能包括電源的開關噪聲;工業機械、電機等產生的火花引起的噪聲;繼電器、變壓器、蜂鳴器、熒光燈等的感應噪聲;靜電放電,通常來自用戶身體,但也來自其他地方;當然還有閃電。圖1內部噪聲可能來自多種來源。PCB上的電流環
- 關鍵字:
瑞薩 微控制器
- 前言STM32:意法半導體在 2007 年 6 月 11 日發布的產品,32位單片機。GD32:兆易創新 2013 年發布的產品,在芯片開發、配置、命名上基本模仿 STM32,甚至 GPIO 和 STM32 都是 pin to pin 的,封裝不改焊上去直接用。有時候 STM32 的源碼不修改,重新編譯燒寫到 GD32 上就可以跑。當然也有很多不同,比如串口驅動、USB 、庫文件等。ESP32:樂鑫公司 2017 年開發的產品,和 STM32、GD32 不同,ESP32 主要面向物聯網領域,支持功能很多,
- 關鍵字:
MCU ESP32 GD32 STM32有什么 單片機
- 在我理想的數字世界中,也是我經常夢想的,就是信號電壓裕量總是正的,信號時序裕量總是正的,電源電壓總是在工作電壓范圍內,芯片的工作環境是完全良性的。作者:Graeme Clark,Jackie Chen不幸的是,我們沒有人生活在這個理想的世界里,無論我多么想。現實世界是嘈雜的和讓人不愉快的,我們設計中的供電從來都不是完美的。電源電壓可能降至正常工作電壓范圍以下,從而導致系統故障;開關瞬變會產生噪聲并降低信號裕量;阻抗不連續性會使信號失真,從而降低信號裕量等等。圖1更糟糕的是,因為應對靜電放電,雷電浪涌導致的
- 關鍵字:
瑞薩 微控制器
- 水位指示器采用了一種簡單的機制來檢測和指示高架水箱或任何其他水容器中的水位。感應是通過使用一組9個探針來完成的,這些探針被放置在水箱壁上的9個不同的高度(從9號探針到1號探針按高度遞增的順序放置,公共探針(即一個承載供應的探針)被放置在水箱的底部)。第8層代表 "油箱滿 "的狀態,而第0層代表 "油箱空 "的狀態。當水位低于最小可探測水位(MDL)時,七段顯示器被安排顯示數字0,表示水箱是空的,當水位達到1級(但低于2級)時,探頭之間的連接得到完成(通過導電介質-水
- 關鍵字:
水位控制 微控制器 感應
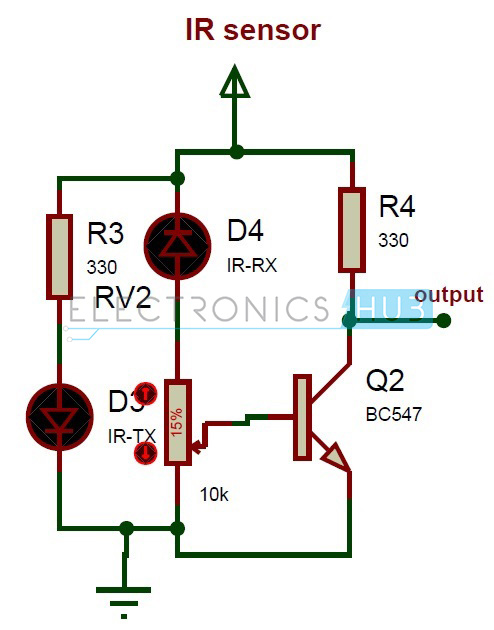
- 如今,由于汽車的快速增長和交通燈之間的巨大時間延遲,控制交通成為主要問題。因此,為了糾正這個問題,我們將采用基于密度的交通燈系統。這篇文章解釋了如何根據密度來控制交通。在這個系統中,我們將使用紅外傳感器來測量交通密度。我們必須為每條道路安排一個紅外傳感器;這些傳感器總是感知該特定道路上的交通情況。所有這些傳感器都與微控制器連接。基于這些傳感器,控制器檢測交通情況并控制交通系統。基于密度的交通信號系統電路原理:這個交通系統的主要核心是微控制器。紅外傳感器連接到微控制器的C口(PC0、PC1、PC2和PC3)
- 關鍵字:
微控制器 交通信號 紅外傳感

- 中國上海,2023年6月27日——東芝電子元件及存儲裝置株式會社(“東芝”)今日宣布,在其搭載32位微控制器產品組“TXZ+TM族高級系列”的“M3H組”中新推出“M3H組(2)”,該系列產品配備了采用40nm工藝制造而成的Cortex?-M3。近年來,隨著數字技術的滲透,特別是在物聯網IoT領域的普及,以及日益先進的各種設備功能,用戶對更大程序容量和支持FOTA(無線固件升級)的需求不斷增加。新產品M3H組(2)將東芝現有產品M3H組(1)的代碼閃存容量從512KB(部分為256KB或384KB)擴展至
- 關鍵字:
東芝 TXZ+ Cortex-M3 微控制器

- 在這個項目中,我將向你展示如何使用8051單片機生成一個PWM信號,以及如何使用單片機進行基于PWM的直流電動機速度控制。項目簡介在許多應用中,控制直流電動機的速度是很重要的,在這些應用中,精度和保護是必不可少的。在這里我們將使用一種叫做PWM(脈沖寬度調制)的技術來控制直流電動機的速度。我們可以使用機械或電氣技術來實現直流電動機的速度控制,但它們需要大尺寸的硬件來實現,但基于微控制器的系統提供了一種簡單的方法來控制直流電動機的速度。早些時候,我們已經看到了如何在沒有微控制器的情況下使用PWM控制直流電動
- 關鍵字:
直流電機 微控制器 PWM
- 前言實現延時通常有兩種方法:一種是硬件延時,要用到定時器/計數器,這種方法可以提高CPU的工作效率,也能做到精確延時;另一種是軟件延時,這種方法主要采用循環體進行。01使用定時器/計數器實現精確延時單片機系統一般常選用11.0592MHz、12 MHz或6MHz晶振。第一種更容易產生各種標準的波特率,后兩種的一個機器周期分別為1μs和2μs,便于精確延時。本程序中假設使用頻率為12MHz的晶振。最長的延時時間可達216=65536 μs。若定時器工作在方式2,則可實現極短時間的精確延時;如使用其他定時方式
- 關鍵字:
單片機 延時
- 【2023 年 6 月 12 日,德國慕尼黑訊】工業控制系統即便是在惡劣的環境下也必須保持最低的出錯率,因此安全和可靠的系統開發至關重要。英飛凌科技股份公司(FSE代碼:IFX / OTCQX代碼:IFNNY)推出的AURIX? TC3x和TRAVEO? T2G微控制器產品系列通過廣泛集成的硬件功能安全與網絡安全功能來滿足這些要求。這兩個產品系列均擴大了對IEC 61508軟硬件技術指標的支持,包括功能安全認證所需的所有文件。另外,英飛凌AUTOSAR微控制器MCAL底層驅動軟件產品也支持IEC 6150
- 關鍵字:
英飛凌 AURIX TRAVEO 微控制器 IEC 61508
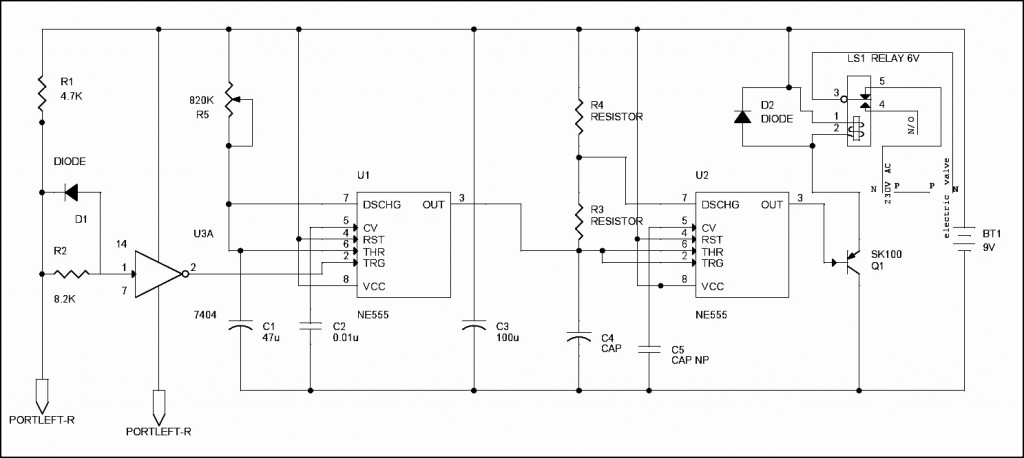
- 這里有一個簡單的項目,在沒有任何人工干預的情況下自動澆灌植物,非常有用。我們可以稱它為自動植物灌溉系統。我們知道,人們在度假時不會把水倒在花園里的植物上,或者經常忘記給植物澆水。因此,有可能使植物受損。這個項目是解決這類問題的好辦法。自動植物灌溉系統的方框圖:原理:電路沒有那么復雜。我們在這個電路中使用基本的概念,即土壤在干燥時有高電阻,在潮濕時有非常低的電阻。通過使用這個概念,我們將使這個系統工作。我們在土壤中插入兩個探針,當土壤潮濕時,它們會導電,當土壤干燥時,它們不會導電。因此,當探針不導通時,系統
- 關鍵字:
自動灌溉 微控制器 農業
單片機(微控制器)介紹
您好,目前還沒有人創建詞條單片機(微控制器)!
歡迎您創建該詞條,闡述對單片機(微控制器)的理解,并與今后在此搜索單片機(微控制器)的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473