關于智能車模起跑線識別方法的設計與實現
——


圖6 數軸標注D的取值范圍
圖6中計算所得的D值范圍為(25, 30-1.5d)。但是也要考慮特殊情況。由于車身在經過起跑標志線時并不是每次都能保持和跑道引導線平行,所以要考慮當車身偏斜進入起跑線時的情況會不會使(1)式有所變化。如圖7所示。
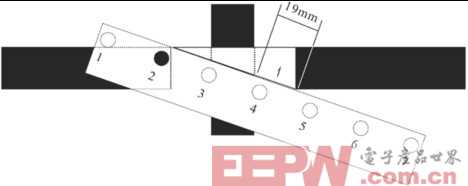
圖7 車身偏斜進入起跑標志線的情況
考慮偏斜的角度如圖7所示,車身偏斜時在起跑線白色間隙的長度f=19mm,這樣(1)式的數學描述中發生變化的僅僅是圖4所示中的跑道間隙值17.5mm,該值被f代替。帶入新值后用數軸標注法標注D值的區間如圖8所示。比較圖6發現, A點向B點靠近形成Aˊ點,并沒有超過B點;C點和D點分別移動到到Cˊ和Dˊ的位置,所以D的取值范圍有擴大的趨勢,這樣,圖6標注的D值范圍符合要求。




















評論