基于智能車非勻速行駛記憶算法的研究和實現

在由直線進彎時,如果在彎道中出現直道,并且計算出其長度小于某一值的時候,認為是過彎過程中出現的小范圍的直線,仍按照彎道處理。本算法的核心也在于如何過濾彎道中出現的直道,以及從分析不同的彎道形式。把彎道分成以下幾類:
本文引用地址:http://www.104case.com/article/95472.htm(a) 急彎:這里所說的急彎也就是競賽規定的曲率最小的彎。當車過急彎時,其采集的數據如下所示:
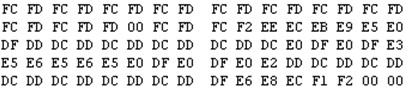
可見在急彎時,轉角的個數相對較少,轉角值相對較大,并且在正常情況下所有的都是同向的。
(b)圓形彎道:圓形彎道也是第二屆比賽中新增加的賽道元素,其除了包括實際意義上的圓形賽道之外還包括一個相對較大的彎道。相比于其他幾種賽道元素,圓形賽道的識別比較簡單,當同一個方向的轉角大于某一個數值時,并且中間過程中沒有換向發生,便可以認為小車進入了圓形賽道。下述數據是車經過圓形賽道時采集的數據:
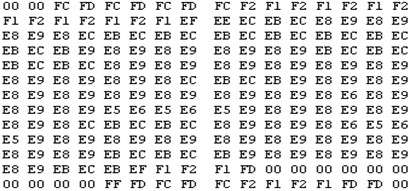
因為在角度的控制上,本系統采用了模糊控制,車在進彎時能夠迅速調整角度,并以一個恒定的角度過彎,以上的數據是驗證了這一結果。
(c)小S彎:對于人眼觀察小S道是不存在直道的,但是由于光電傳感器的局限性,它會檢測出大范圍的直道,本系統所做的第一件事情就是把這些直道過濾掉,也正是利用這些信息小車實現了S道直走。下述數據是小S時的過彎數據:
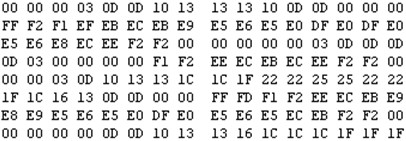
小S彎的特點是:在過彎的整個過程中既有左轉又有右轉的,并且左轉角度的個數和右轉角度的個數都應該大于某一個值。此外,單次左轉或者右轉的角度的個數小于某一個值。考慮到小S的前后可能會接著其他彎道,本系統在第一個換向點之前,按照其彎道行走,在換向點之后采取小S的行走策略,在最后一個換向點之前結束。
(d)大S彎:在本屆比賽中增加了大S和曲率漸變的S道,這給記憶算法實現增加了很大的困難。大S相比小S而言,其賽道特征是相似的,只是判斷的標準稍有不同。首先,大S之間有較長距離的直道,必須加大直道的判斷范圍才能將其過濾掉。其次,單次左轉或者右轉的角度的個數應該大于小S的個數。
針對以上賽道分析,系統首先分辨下一步的賽道元素,然后按照行駛策略,將第二圈的行駛速度及方向進行控制。其主要思想為:
(a)直道行駛:由于在進直道的時候已經對直道的長度已經有一個預先的認識,這使得直道的行駛能夠做到游刃有余。將直道分為短直道和長直道,短直道就做一般加速處理;長直道在起始處全力加速,末端進行線型減速,也即將速度分成高速,中速,低速,從高到中再到低。經實驗發現直接從高速轉為低速時,小車在過彎時不穩,容易測滑,不僅影響速度,啟動也慢。采用線型減速后過彎流暢,能達到很好的效果。這樣就避免了由于車本身的某些局限性,如舵機響應時間、賽道摩擦系數、輪胎抓地力、傳感器布局等因素的影響所造成的直線速度不能加到最高的缺點。
(b)對于小S,理想的情況下是實現同CCD同樣的效果,采取高速直線過彎的策略。為了安全起見也可以采用滯后過彎的策略,讓智能車采取較小的轉角高速過彎。
(c)對于大S賽道,不同的曲率彎道,小車有它最佳極限速度存在。本系統利用初圈得到彎道的曲率半徑以及S道之間直線的長度,在過各彎道時將車速調至它相應的極限速度,從理論上就是它所能跑出的最優成績了。
(d)對于圓形彎道,需要在彎道的曲率和過彎的速度之間做一個權衡。當行駛的曲率較大時,那么車可以以較高的速度行駛,當走內圈時,由于半徑的減少,離心力的增大,就不能以較高的速度行駛,但是可以找到兩者之間的平衡點。
4、小結
通過本文所述的算法的研究和調試實現,小車的運行速度提高非常明顯,也可以明顯地看出小車在各種環境如直道、各類彎道下運行的特點。隨著賽道類型愈來愈復雜,需要抽象出更多更復雜的模型進行分析,采取最優的過彎策略,這樣在比賽中才能做到游刃有余,對此本文計劃做進一步的研究。
參考文獻:
[1] 邵貝貝. 單片機嵌入式應用的在線開發方法. 北京:清華大學出版社. 2004 年10 月第1 版
[2] 卓晴,黃開勝,邵貝貝.學做智能車.北京航空航天大學出版社.2007年3月第1版
[3] 諸靜. 模糊控制原理與應用. 機械工業出版社. 2005年1月第二版
[4] Freescale Semiconductor MC9S12DG128_datasheet.pdf












評論