基于ARM與DSP的嵌入式運動控制器設計

嵌入式運動控制系統系統進行加工的過程實際上就是從ARM上位機傳輸數據到MCX314As下位機的過程。其控制流程如下:
本文引用地址:http://www.104case.com/article/93421.htm(1)加工程序運行開始,首先對MCX314As芯片進行初始化。對MCX314As芯片進行設置初始速度、加速度、減加速度、加速度變化率、正轉反轉方式、邏輯位置計數器清零、實際位置計數器清零等。
(2)選擇需要進行加工的軸,MCX314As芯片有X、Y、Z、U四個軸,都有著相同的功能能力,能實現四軸三聯動。
(3)設置所選軸模式和運行參數,包括直線定速模式、單步插補輸出模式和中斷請求。
(4)初始化位置計數器,即將數據庫中的行號寫入此計數器進行減法計算,每處理完一行數據進行減一處理。
(5)進行命令和數據傳輸,發出數據后對狀態寄存器進行檢查,加工完一段后發出信號然后再發送下一組數據,一直到加工完成為止。在加工過程中一旦出現中斷,首先讀取各寄存器數據進行保存,等待恢復加工后再讀寫出來。整個數據庫文件輸出結束后,保存運行系統完成后的數據信息和系統所處的狀態信息,以備下個零件加工,由此加工結束。
運動控制器在XY兩軸數控伺服工作臺中的應用
XY兩軸工作臺是采用滾珠絲桿和滾動導軌傳動的十字工作臺(X、Y兩軸垂直)。X、Y兩軸兩端各有1個限位開關。采用松下交流伺服電機(型號MSMA022A1C,功率200W,額定轉速3000r/min,額定轉矩0.64Nm)驅動工作臺運動,電機驅動器采用松下伺服驅動器MSDA023A1A。采用光電編碼器作為位置反饋器件(伺服電機同軸安裝11線2500P/r增量編碼器)[3]
圖2是該平臺的X軸驅動原理圖[1],Y軸驅動與X軸驅動電路相同。圖中M為伺服電機,EC是編碼器。將伺服驅動器的“控制模式”設置為“位置控制”,把指令脈沖設置為CW/CCW方式。S3C2410按流程圖操作MCX314As,設置相應的運動參數,寫入功能命令,即可完成對平臺的運動軌跡控制。
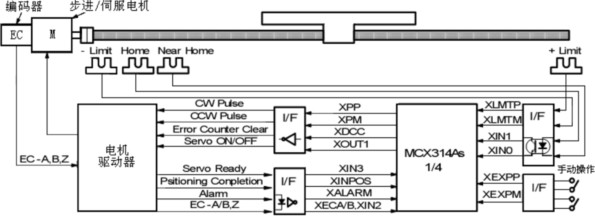
圖2 單軸信號驅動系統的接口示意框圖

伺服電機相關文章:伺服電機工作原理








評論