LPC23xx的自適應以太網通信接口設計

以太網接口是嵌入式系統進行以太網通信的硬件基礎。隨著微電子技術的進步,許多嵌入式控制芯片集成了以太網控制器,這使得嵌入式系統中以太網接口的開發更為便利[1]。LPC23xx是NXP半導體公司(由Philips公司創建)于2006年12月前后推出的基于ARM7TDMIS內核的微控制器,與LPC21xx和LPC22xx相比,最為突出的特點是片上集成了10Mbps/100 Mbps以太網控制器。
本文引用地址:http://www.104case.com/article/85905.htm1 LPC23xx以太網控制器的結構和配置
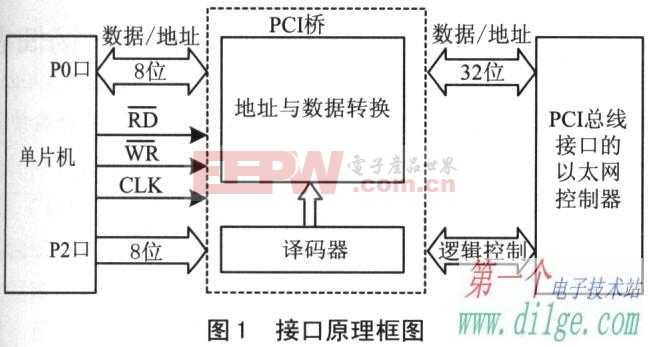
如圖1所示,LPC23xx以太網接口主要部分的功能如下[2]:
圖1 LPC23xx以太網接口示意結構框圖
① 控制寄存器,用于配置以太網控制器的工作方式、讀取控制器的當前狀態等;
② 總線接口,AHB總線與以太網控制器進行數據交換的接口;
③ 接收/發送DMA,實現接收/發送緩沖區到總線接口的批量數據傳輸;
④ 接收/發送緩沖區,與DMA協同工作,暫存接收/發送的數據;
⑤ 發送流量控制,在網絡負載過大時插入以太網暫停幀以控制網絡流量;
⑥ 接收過濾器,濾除以太網幀的控制部分,提取有效的數據;
⑦ MII(介質無關接口)/RMII(裁減的介質無關接口),與外部PHY設備按規定的時序進行實時數據通信的接口;
⑧ MMII(MII管理接口),配置PHY設備的工作方式,讀取PHY設備的當前狀態信息。
在使用LPC23xx的以太網控制器之前,用戶須將正確的配置信息寫入圖1中的控制寄存器。其步驟如下:
① 清除LPC23xx以太網控制器的軟件復位狀態;
② 通過MMII對PHY設備進行正確的配置;
③ 選擇與PHY設備的通信接口(RMII或MII),受芯片尺寸所限,NXP已推出的LPC 2364、LPC2366、LPC2368和LPC2378只有RMII的引腳;
④ 配置DMA引擎和收發緩沖區的首地址及長度;
⑤ 配置以太網接口的MAC(介質存取控制)地址,選擇以太網速率(10 Mbps或100 Mbps);
⑥ 使能接收/發送通道。
在以上6個步驟中,較為關鍵是對接收/發送緩沖區的配置(步驟④),以下為詳細的配置過程。為不影響以太網接口數據傳輸的實時性,一般選取LPC23xx以太網控制器專用的16KB RAM作為收/發緩沖區的物理載體。按以太網幀的結構,可將收/發緩沖區分別劃分為若干個相對獨立的緩沖單元(也可以不劃分),每個單元對應著一個或多個描述符和狀態符。描述符用來設置對應部分的首地址和控制信息,狀態符存儲著對應單元最新的狀態信息。這些描述符和狀態符在邏輯上分別組成一個環形陣列:描述符環形陣列的首地址由RxDescriptor(接收描述符基址寄存器) /TxDescrip tor(發送描述符基址寄存器)指定,大小由RxDecriptorNumber(接收描述符寄存器數量) /TxDescriptorNumber(發送描述符寄存器數量)指定;狀態符的陣列首地址由RxStatus(接收狀態基址寄存器) / TxStatus(發送狀態基址寄存器)指定,大小與描述符陣列相同。在描述符陣列和狀態符陣列形成后,就可以通過RxProducerIndex(接收產生索引寄存器) /TxProducerIndex(發送產生索引寄存器)、RxConsumerIndex(接收消耗索引寄存器) /TxConsumerIndex(發送消耗索引寄存器)對描述狀態符陣列進行操作而實現數據的收/發。
2 網絡數據接收和發送的控制
NXP公司在LPC23xx的用戶指南(參考文獻[2])中對其以太網控制器中數據的接收和發送有較為詳細的介紹;但沒有涉及描述符和狀態符的環形陣列的概念,接收和發送的控制過程較為機械,本文在實際工程應用的基礎上對此做了改進。以發送為例,圖2為一個連續發送過程,將發送緩沖區分為4個單元,0和4、1和5、2和6、3和7是與這4個單元對應的描述符。發送過程如下:
① 如果上次數據發送完畢,就得到圖2(a)所示的狀態,此時TxProducerIndex=TxConsumerIndex
② 將要發送的數據寫入4個緩沖單元中,將TxProduceIndex更新為4TxProducerIndex,即為圖2(b)所示的狀態,此后數據開始發送;
③ 等待上次發送結束(用中斷或查詢均可以實現等待),得到圖2(c)數據發送完畢的狀態;
④ 若有后續的數據要發送,再將數據寫入4個緩沖單元中,將TxProducerIndex更新為4TxProducerIndex,就得到圖2(d)所示的狀態,此后數據開始發送;
⑤ 重復以上過程,就得到了圖2所示的連續發送過程。
圖2 LPC23xx以太網控制器的連續發送過程






評論