FPGA+DSP實時三維圖像信息處理系統

2.2 FPGA圖像預處理模塊
本文引用地址:http://www.104case.com/article/84262.htm預處理從巨大的視頻信息中提取極少量的對三維重建有用的信息傳送至DSP后處理。該模塊包括主處理FPGA芯片和高速FIFO,負責實時采集視頻信號并對采集到的無壓縮的視頻信息進行預處理,包括提取激光中心線、提取輪廓線、提取中心顏色線三個部分。
為了提高視頻采集的整體性能,更重要的是為預處理提供相鄰的有激光幀和無激光幀,必須通過視頻幀緩存首先暫存無激光幀。緩存由3片AverLogic公司的AL422B及一些由FPGA實現的連接邏輯組成;當前端模塊輸出無激光幀時,SA7111A控制3片AL422B寫操作,將其存入FIFO;當前端輸出有激光幀時,后端的視頻處理模塊控制3片AL422B進行讀操作,讀出暫存在其中的無激光幀數據。預處理FPGA將讀取的無激光幀和有激光幀進行相減運算。輸出同樣采用3組緩存分別用來暫存激光樣條數據、目標輪廓線數據和圖像中心線數據;所有模塊均采用同步時鐘控制,同步時鐘采用由SAA7111A模數轉換器產生的LLC2信號。為了提高系統速度,算法復雜、耗時較長的計算過程進行了流水線處理。
2.3 DSP三維重建模塊
為了應對三維圖像大數據量復雜高速運算的需要,這里采用了兩片TigerSHARC 201芯片并行三維重建運算。由控制FPGA對兩片DSP所要處理的圖像進行任務分配,DSP結合預處理FPGA存入FIFO的數據和PCI總線所給處理參數進行定標參數計算、坐標計算、三維重建和構型。由于TS201內部集成的總線仲裁機制,雙DSP可以實現無縫連接,大大減小了多DSP協調工作的設計難度。DSP間的連接是依靠其擁有的全雙工LinkPort,它采用LVDS(低電平差分信號)輸入數據。鏈路口能獨立或同時工作,在時鐘的上升沿和下降沿鎖存數據。鏈路時鐘頻率最高可以與處理器核相同,高達500MHz,每個鏈路能完成500Mbps的單向數據傳輸。每個DSP的4個LinkPort合起來最大的通透率為4.0Gbps。連線短且簡單,不需要額外的輔助電路,且可有效防止連線長引起的信號畸變。LinkPort傳輸協議由控制FPGA完成。
2.4 PCI通信接口模塊
根據三維信息獲取系統的速度傳輸要求,采用PCI接口完成該系統與通用PC的信息交互。PCI接口控制器是硬件部分的控制中心和數據交換中心,它接收設備驅動程序的命令和數據,配置和控制系統的各個模塊使其協調工作,完成系統任務;它還負責將采集到和處理后的數據通過PCI總線轉送給通用PC。本系統采用PLX公司的32bit/33MHz PCI9030作為接口芯片,串行EEPROM-FM93CS56L電可擦除只讀存儲器保存PCI9030的配置信息。
2.5 系統控制與數據交換模塊
控制單元對處理器的數據處理單元和輸入數據格式轉換單元以及所有FIFO存儲器產生控制,與預處理FPGA配合完成DSP的LinkPort協議。由于數據處理單元中為流水處理,在控制單元的設計中要特別注意由流水線產生的固定周期的延時,延時的周期數等于相應流水線的級數。控制單元還與PCI接口連接,接收來自主計算機的控制信號和背景閾值等信息。控制FPGA還是SAA7111A、PCI接口和DSP之間的圖像和信息交換的橋梁,為其提供所需要的參數和數據信息。
3 軟件設計與實現
3.1 圖像預處理算法
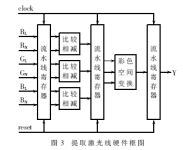
如圖3,激光帶預處理算法的實現[2]為:由于有激光幀和無激光幀是依次交替產生的,因此首先要保存一幀有激光幀,在其下一幀,即無激光幀到來時,將保存的有激光幀和當前無激光幀的相同行、列的點相減,再對結果進行亮度提取,處理完成后的數據存入目標緩存。
如圖4,實現提取輪廓線算法分為三個部分[3],首先由計算比較模塊對輸入像素點的值與預先計算好的閾值進行比較,判斷其是否為目標像素;然后利用一個序列檢測模塊進行一維尺度濾波以去除某些噪聲點;再經過一個邊緣檢測模塊,提取出每行的第一個目標像素作為目標的左邊緣點;完成后將此點所對應的列地址數據存入目標緩存。在某些情況下,可能整行都檢測不到邊緣點,這時將0存入目標緩存作為無邊緣點的標識。

提取中心線算法實現比較簡單,只需對目標緩存的寫允許信號加以控制,使RGB數據只能在每行的中心點處寫入目標緩存即可。
3.2 三維重建和構型
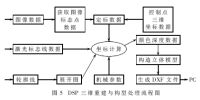
如圖5所示,高速DSP將根據預處理信息得到的激光標志線、輪廓線和中心顏色線數據與源數字化圖像結合起來進行三維重建。首先根據獲取的圖像標志點數據結合控制點三維坐標數據計算出系統定標數據;其次根據輪廓線計算物體外表面展開圖,再依據定標數據結合展開圖和機械參數對圖像中的坐標點進行計算,給出數據集,輸出深度數據文件;最后對多次掃描的數據進行融合,將離散點構型成立體模型(或立體彩色模型),將模型生成DXF、STL等數據文件傳入PC機,使用后端處理軟件進行顯示[3]。












評論