微型足球機器人行為產生方法與實現

摘要:將整個賽場劃分成10個區域,分析了機器人在活動區域的基本行為,確定了不同情況下的有利目標點和反應條件,建立了機器人行為觸發機制。該行為產生方法將角色分配和行為產生相結合,使場上每個機器人隨時都有明確的目標和行為,結構層次分明,實時性強,便于升級。
關鍵詞:機器人足球策略行為產生角色分配反應行為
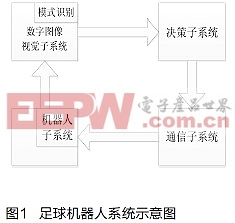
機器人足球賽為機械設計、自動控制、人工智能、計算機視覺等提供了一個良好的研究與試驗平臺,已成為一個熱門研究課題。微型機器人足球賽是機器人足球賽中最基本的一種,它由視覺子系統、無線通信子系統、策略子系統以及足球機器人子系統組成。比賽是在策略子系統指揮下自主進行的,每秒鐘要處理25或30幀圖像。當擁有了良好的硬件設備后,整個球隊水平主要決定于策略子系統的水平。其主要任務包括:場上攻防態勢判斷、球隊中每個機器人角色劃分及任務分配、機器人運動規劃、機器人問相互配合等。由于場上形勢千變萬化,決策時間又相當短暫,所以如何構建一個良好的策略子系統成為研究的重點。文獻[5]采用實時自組織模糊決策樹進行決策,將球所在區域以及雙方控球狀態劃分成12種情況,針對每種情況提出了相應的策略。由于判斷條件比較復雜,實施起來難以達到滿意的效果。文獻列出了常見的反應行為,并給出了有利目標點的計算方法。其缺點是沒有給出一種合適的行為觸發機制。本文分析了機器人應有的幾種反應行為,確定了策略研究重點,提出了一種新的隊員角色分配策略,可以根據不同的情況產生不同的行為并動態地分配給相應的機器人;設計了一套行為觸發機制,能及時合理地觸發反應行為,從而保證場上每個機器人隨時都有明確的目標和行為。
1 場地的劃分
根據比賽過程分析,將球場劃分成如圖l所示幾個區域。區域l、2、3、4為角區,5、6為邊界區域,區域7為防守區,區域8為進攻區,區域9、10分別為我方禁區和對方禁區。

2 行為標志及有利目標點的確定
2.1 足球機器人應有的反應行為及其條件
下面分析攻,防隊員的基本行為。守門員的動作行為比較特殊,可參見文獻。綜合分析足球機器人的場上行為,可劃分為如下幾類:
(1)射門
當機器人離球較近且處于較有利的位姿時,如圖2所示,應毫不猶豫地進行射門以破門得分。射門行為的觸發條件為:
①機器人與球的距離d小于某個臨界值d0,在實驗中取d0=30cm;
②機器人的朝向與機器人和球連線方向的夾角AB小于某個臨界值島θ0,在實驗中取θ0==30

評論