利用ST16C554D實現DSP多路串行通訊

2004年11月A版
本文引用地址:http://www.104case.com/article/4686.htm摘 要: 給出了DSP多路串行通信系統的構成及相關程序代碼。
關鍵詞: DSP;串行通訊;ST16C554D;TMS320VC33
引言
DSP是數字信號處理理論與超大規模集成電路技術融合的結晶。目前,DSP技術正廣泛地應用于通信、語音、圖像、航空航天、儀器儀表等領域,在推動信息處理數字化方面發揮著越來越大的作用。隨著應用領域越來越廣,應用環境也越來越復雜,如何實現DSP與外設的可靠數據交換就變得至關重要。串行通訊成本低,結構簡單,控制方便,DSP和外設的通訊通常都采用這種方式。
TMS320VC33是TI公司一種浮點DSP芯片,性價比高,指令執行速度可達150 MFLOPS。但是為了不使其強大的計算能力受到影響,TMS320VC33僅提供了一個串口,要實現多路串行通訊,就必須通過外部器件來擴展。
ST16C554D
ST16C554D是EXAR公司生產的通用異步通信芯片,可支持4路獨立的串行通訊。芯片的每路傳輸和接收單元都提供了獨立的串并轉換和并串轉換,以實現串行異步數據接收同步。串行數據流的同步通過添加起始位和停止位實現,而數據的完整性通過校驗位來確認,在同一塊芯片上要集成這種多路串行通訊是較為復雜的,ST16C554D采用了先進的CMOS處理技術,達到了低損耗和高速率的要求。
與普通處理器相比,ST16C554D提供了16字節的接收和發送FIFO,這就允許外部CPU在給定的時間內處理更多的在線任務,并減少了全局的UART中斷服務時間。
另外,ST16C554D將16C554D和68C554D的兩種封裝集成在同一個芯片上,使用方便。16模式用于與INTEL系列芯片接口,而68模式用于與MOTOROLA和其他通用接口。
ST16C554D特性有:
TMS320VC33多路通訊系統的實現
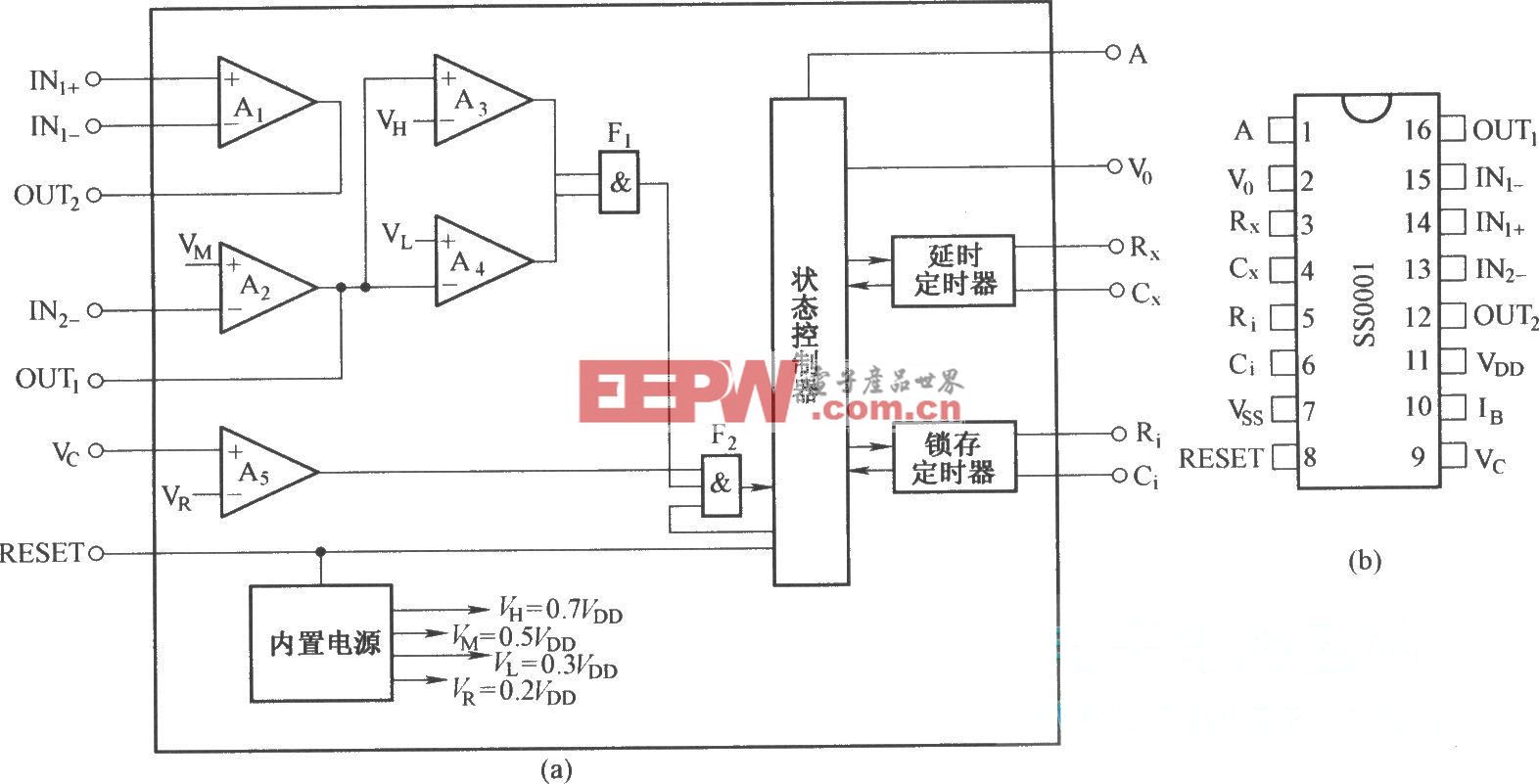
圖1是某捷聯慣性導航系統的部分原理框圖,通過ST16C554D實現了DSP芯片TMS320VC33的多路串行通訊。圖中三個陀螺為光纖陀螺,陀螺數據采用RS-422串行輸出,輸出周期為1ms。
圖中,ST16C554D的讀寫信號和通道片選由DSP的選通信號STRB、地址信號A3-A6及讀寫信號R/W產生。為了使整個系統成為完全可編程系統,采用了一片可編程邏輯器件GAL20V8B來實現邏輯控制,從而增加了系統的靈活性。GAL芯片采用ABEL語言編程。ST16C554D譯碼電路的邏輯方程如下:
EQUATIONS
!CSA=!PAGE3&!AR6&!AR5&!AR4!&!AR3;
!CSB=!PAGE3&!AR6&!AR5&!AR4&AR3;

!CSC=!PAGE3&!AR6&!AR5&AR4&!AR3;
!CSD=!PAGE3&!AR6&!AR5&AR4&AR3;
!IOR=!PAGE3&RW&!STRB;
!IOW=!PAGE3&!RW&!STRB;
本系統中,ST16C554D的通道D用作監控口和PC機接連,通道A、B、C的接收端用于接收陀螺數據,通道C的發送端也與PC機相連,可在通道D的監控下高速發送各陀螺的原始數據。例如,PC機向通道D發送指令“$A#”,DSP接收到該指令后將X陀螺的原始采樣數據從通道C高速發送至PC機。
通道D采用RS-232方式,波特率為19.2Kbps,用MAX232實現電平轉換后可直接和PC機串口連接。通道A、B、C采用RS-422方式,波特率為460.8Kbps,可用MAX3095芯片做接收電平轉換,用MAX3045芯片做發送電平驅動。考慮通道C發送端要和PC機相連,而PC機串口僅支持RS-232協議,故系統使用了PCI1601轉換卡。PCI1601帶有兩個9針的RS-422串口,采用PCI總線和PC機相連,安裝驅動后使用方法和普通PC機串口一致,波特率可達921.6Kbps。
在串行通訊中,為了保證傳輸可靠性和數據實時性,發送常采用查詢方式,接收常采用中斷方式。但在本系統中,TMS320VC33要執行導航解算程序,若4路接收均采用中斷方式會嚴重影響它的計算能力。考慮A、B、C口陀螺數據爆發周期固定為1ms,且D口由PC機發來的監控指令數據量不大,接收可采用定時查詢方式。
系統中三個陀螺通過1KHz時鐘實現同步。陀螺數據每幀包含7個字節,傳輸波特率460.8Kbps,采用偶校驗,8位數據位,1位停止位,故可以算出每次傳輸時間需要為(8+3)*7/460.8=0.167ms。所以系統將1KHz時鐘經SN54HC174J芯片延時0.2ms后作為TMS320VC33外接的定時時鐘。這樣,TMS320VC33在INT0產生1ms中斷時,數據已傳輸完成,可以在中斷服務函數中將所有通道的寄存器查詢一遍并讀空數據。由于ST16C554D的每路串口有16字長的接收FIFO,該方法不會產生數據丟失,并且延遲很小。
程序設計
在異步串行通訊中,收發雙方必須事先規定兩件事:一是字符格式,即規定傳送中每個字符的具體格式;二是波特率。這些規定是通過設置相關寄存器來實現的。
本系統中,ST16C554D外接晶振7.3728MHz,基地址為0xC00000,由TMS320VC33編程實現它的初始化設置。TMS320VC33的程序在Code Composer C3X 下用C語言編寫,下面僅給出通道C的初始化代碼及收發程序,其他通道與此類似。
#define C_rx_buf_size 100 //接收緩沖區大小
#define C_tx_buf_size 100 //發送緩沖區大小
unsigned char C_rx_buf[C_rx_buf_size]; //接收緩沖區
unsigned char C_tx_buf[C_tx_buf_size]; //發送緩沖區
unsigned int p_C_rx_w=0; //接收緩沖區寫指針
unsigned int p_C_tx_w=0, p_C_tx_r=0; //發送緩沖區讀寫指針
volatile int *Add_C_RHR = (volatile int *)0xC00010; //C口基地址
volatile int *Add_C_THR = (volatile int *)0xC00010;
volatile int *Add_C_DLL = (volatile int *)0xC00010;
volatile int *Add_C_IER = (volatile int *)0xC00011;
volatile int *Add_C_DLM = (volatile int *)0xC00011;
volatile int *Add_C_ISR = (volatile int *)0xC00012;
volatile int *Add_C_FCR = (volatile int *)0xC00012;
volatile int *Add_C_LCR = (volatile int *)0xC00013;
volatile int *Add_C_MCR = (volatile int *)0xC00014;
volatile int *Add_C_LSR = (volatile int *)0xC00015;
volatile int *Add_C_MSR = (volatile int *)0xC00016;
void init_ST16C554D_C( ) //串口C口的初始化函數
{ *Add_C_LCR = 0x80; //使能波特率因子寄存器
*Add_C_DLM = 0x00;
*Add_C_DLL = 0x01; //設置波特率為460800
(主頻7.3728M)
*Add_C_LCR = 0x1b; //選擇字長為8位,停止位為
1位,偶校驗
*Add_C_FCR = 0x07; //選擇FIFO MODE
*Add_C_IER = 0x00; //禁止中斷
*Add_C_MCR = 0x08; //選擇NORMAL MODE
}
void Read_ST16C554D_C( )//串口C口的接收函數,置于INT0中斷函數中
{ while( (*Add_C_LSR) & 0x01 ) //判C口線狀態寄存器
{ *( C_rx_buf + p_C_rx_w) = (*Add_C_RHR) & 0x0ff; //接收數據送接收緩沖區
p_C_rx_w ++; //接收緩沖區指針加1
if(p_C_rx_w == C_rx_buf_size) p_C_rx_w = 0; //接收緩沖區指針回零
}
}
void C_tx_handle() //串口C口的發送函數
{ while(p_C_tx_r != p_C_tx_w)
{ if( *Add_C_LSR & 0x20 ) //判C口線狀態寄存器
{ *Add_C_THR = *(C_tx_buf + p_C_tx_r); //發送
p_C_tx_r ++; //發送緩沖區指針加1
if( p_C_tx_r == C_tx_buf_size ) p_C_tx_r = 0; //發送緩沖區指針回零
}
}
}
結語
在筆者開發的光纖陀螺捷聯式慣性導航系統中,通過使用ST16C554D擴展了4路串口,電路簡單,傳輸速率高,延時小,并且極大地減輕了主控計算機TMS320VC33的負擔。本設計,在通訊中各通道長期工作正常,完全達到了預期目的。
參考文獻:
1. ST16C554D data manual. EXAR Corporation
2. TMS320VC33 Digital Signal Processor. Texas Instruments.2002
圖1 多路通訊原理框圖

數字通信相關文章:數字通信原理
通信相關文章:通信原理





評論