基于虛擬儀器的機(jī)載陀螺儀測(cè)試系統(tǒng)研究

為了方便和規(guī)范測(cè)試系統(tǒng)程序的編寫,將各個(gè)硬件模塊的驅(qū)動(dòng)編譯生成動(dòng)態(tài)庫(kù),由測(cè)試系統(tǒng)程序根據(jù)需要進(jìn)行調(diào)用。系統(tǒng)程序開發(fā)過程中,硬件驅(qū)動(dòng)和虛擬儀器界面的開發(fā)是重點(diǎn)。
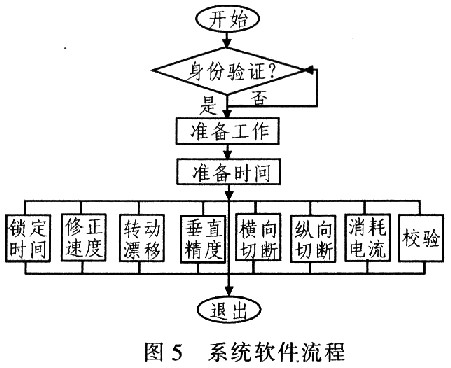
本文引用地址:http://www.104case.com/article/275207.htm硬件驅(qū)動(dòng)設(shè)計(jì)是對(duì)智能板卡進(jìn)行程控,方便測(cè)試系統(tǒng)程序的編寫和集成。航空智能板卡驅(qū)動(dòng)程序是上位機(jī)與下位機(jī)程序通信的紐帶,通過調(diào)用驅(qū)動(dòng)函數(shù)實(shí)現(xiàn)計(jì)算機(jī)對(duì)硬件的控制。虛擬儀器界面提供人機(jī)接口,操作員根據(jù)需要施加信號(hào),實(shí)時(shí)監(jiān)測(cè)信號(hào)。CVI提供了開發(fā)虛擬儀器界面的用戶接口資源文件(*.uir)、各種控制和顯示控件,用于模擬實(shí)際儀表界面。分析完成航空電源智能采集板上位機(jī)采集功能所需的各種控件。根據(jù)CVI軟件編程,完成控件的編制,除了一些基本的控制顯示控件外,還有一個(gè)示波器顯示控件,它用于顯示采集數(shù)據(jù)的波形。機(jī)載陀螺進(jìn)行檢測(cè)系統(tǒng)軟件流程如圖5所示。
控制函數(shù)的編寫過程中,由于在板卡功能設(shè)計(jì)中有交流和直流之分,因此在波形顯示界面設(shè)計(jì)時(shí),也將其分為交流和直流2個(gè)波形顯示界面。而在運(yùn)行程序過程中,采集交流或直流,都需將另外一個(gè)隱藏起來,這就用到函數(shù)SetCtrlAttribute(panelHandle,PANEL_STRIPCHAR- T,ATTR_VISIBLE,1)和函數(shù) SetCtrlAttribute(panelHandle,PANEL_GRAPH,ATTR_VISIBLE,0)。在控制函數(shù)中,繪制波形的函數(shù) PlotStrip Chart(panelHandle,PANEL_STRIPCHART,data,1,0,0,VAL_DOUBLE); 采用函數(shù)SetCtrlAttribute(panelHandle,PANEL_TIMER,ATTR_ ENABLED,1)打開時(shí)鐘,進(jìn)行數(shù)據(jù)采集。
3 應(yīng)用設(shè)計(jì)
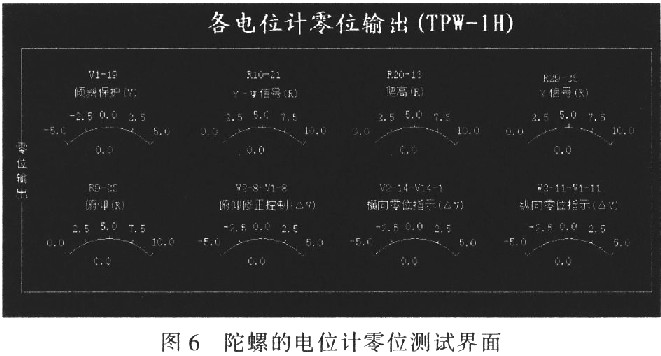
采用基于虛擬儀器技術(shù)的機(jī)載陀螺儀自動(dòng)測(cè)試系統(tǒng),成功構(gòu)建了多套航空測(cè)試設(shè)備,例如陀螺智能綜合測(cè)試設(shè)備(包括陀螺穩(wěn)定平臺(tái)、垂直陀螺、航向陀螺等)、操縱臺(tái)智能測(cè)試儀、單相靜止變換器校驗(yàn)設(shè)備、飛參模擬器等。機(jī)載陀螺自動(dòng)測(cè)試系統(tǒng)檢測(cè)項(xiàng)目:準(zhǔn)備時(shí)間,垂直陀螺在傾斜和俯仰4°時(shí),接通電源1 min后應(yīng)以±2°的精度輸出水平信號(hào);鎖定時(shí)間,當(dāng)隨動(dòng)托架、外環(huán)架和陀螺組合件處于任何位置時(shí),鎖定時(shí)間應(yīng)不超過15s;修正速度,橫向修正速度 2~8(°)/min,縱向修正速度l~3(°)/min;陀螺漂移(轉(zhuǎn)動(dòng)),垂直陀螺以1(°)/s的角速度旋轉(zhuǎn)360°后,在沿傾斜方向的漂移不大于±2.5°(實(shí)際為±3.5°)等。圖6為某型號(hào)陀螺的電位計(jì)零位測(cè)試界面。
4 結(jié)論
基于虛擬儀器技術(shù)的機(jī)載陀螺儀自動(dòng)測(cè)試系統(tǒng)利用電子電路集成技術(shù)和虛擬儀器技術(shù)的優(yōu)勢(shì),以及多總線設(shè)備互補(bǔ)的功能,實(shí)現(xiàn)了對(duì)多種型號(hào)陀螺儀的自動(dòng)化測(cè)試,具有測(cè)試自動(dòng)化程度高、成本低、易于擴(kuò)展的特點(diǎn)。該項(xiàng)技術(shù)可以應(yīng)用到航空航天、測(cè)控、醫(yī)療器械等領(lǐng)域。

模擬信號(hào)相關(guān)文章:什么是模擬信號(hào)
c語(yǔ)言相關(guān)文章:c語(yǔ)言教程
評(píng)論