基于虛擬儀器的機載陀螺儀測試系統研究

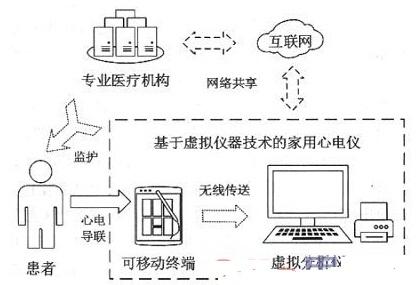
虛擬儀器技術是軟件代替部分硬件設計的技術,其中硬件模塊實現信號的調理、采集和輸出,而軟件實現信號的處理、顯示和產生。利用軟件快速、靈活的運算處理能力,簡化硬件模塊功能,減少硬件模塊體積,提高系統的穩定性和可靠性。另外,該技術只需更改軟件就能滿足大部分信號的測試,具有很強的靈活性和擴展性。
本文引用地址:http://www.104case.com/article/275207.htm目前,傳統的航空機載陀螺儀測試系統采用分立儀器搭建,具有成本高、自動化程度低、擴展性差的缺點,因此,這里提出一種基于虛擬儀器技術的航空機載陀螺儀自動測試系統的設計方案。
1 陀螺儀測試系統硬件設計
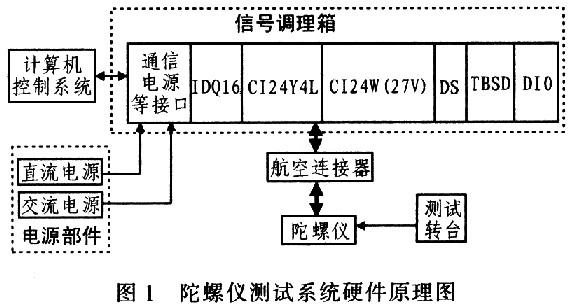
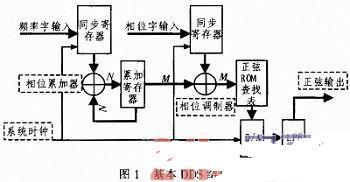
該系統硬件主要是以C8051F005單片機為核心,結合相應的外圍電路實現A/D、D/A轉換以及開關量的控制,采用模塊化設計,通過RS-232總線與計算機控制系統進行通信。考慮到該系統設計的模塊較多,且為了后續擴展,選用標準的3U工業機箱。其系統硬件原理圖如圖1所示。
1.1 測試轉臺
測試轉臺用于標校陀螺精度,每種型號的陀螺都有各自的測試轉臺。在對陀螺進行測試前,需要將陀螺固定在測試轉臺上,并將轉臺調整到水平位置。測試轉臺上有俯仰和傾斜指示刻度,可根據要求將陀螺調整到相應位置。
1.2 陀螺儀和航空連接器
陀螺轉子是陀螺儀的基本部件,常采用同步電機、三相交流電機等拖動方法使陀螺轉子高速圍繞自轉軸旋轉;內、外框架(或稱內、外環)是陀螺自轉軸獲得所需角轉動自由度的結構;附件是指力矩馬達、信號傳感器等。
根據旋轉物體的旋轉軸所指方向在不受外力影響時不改變的原理來保持方向,制造出來的陀螺裝置就叫陀螺儀。陀螺儀在工作時要給它一個力,使它能快速旋轉起來,一般能達到每分鐘幾十萬轉,可以工作很長時間,然后用多種方法讀取軸所指示的方向,并自動將數據信號傳給控制系統。
陀螺儀的種類很多,按用途可分為傳感陀螺儀和指示陀螺儀。傳感陀螺儀用于飛行體運動的自動控制系統中,作為水平、垂直、俯仰、航向和角速度傳感器;指示陀螺儀主要用于飛行狀態的指示,作為駕駛和領航儀表使用。不同型號的陀螺儀通過不同的連接器與信號調理箱連接。因此,測試系統根據陀螺儀的連接情況,需要配備多個連接器。
1.3 電源部件
電源部件為航空機載陀螺儀自動測試系統提供所需的直流和交流電源,直流輸出為+27V,交流輸出為三相36V400Hz和三相115V 400 Hz。陀螺儀型號不同,其消耗功率也不同,交直流一般約O.5 A。
1.4 計算機控制系統
計算機控制系統對采集的數據進行處理,并進行圖像顯示,向操作人員提示及報警。對試驗結果進行分析記錄,以測試報表形式輸出。軟件采用全漢化處理,選用菜單對話形式,將每一步操作方法都顯示在顯示屏上。操作人員可以按照提示完成操作。
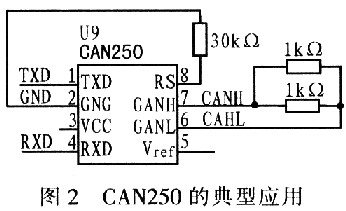
通信模塊實現板卡與計算機之間的通信,計算機使用RS232總線,而智能板卡使用CAN總線,轉換模塊完成數據的采集功能,如圖2所示。
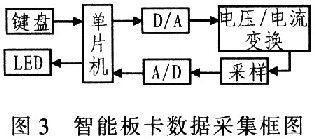
C8051F005單片機實現對D/A轉換器DAC714和A/D轉換器TLC2543的控制,產生直流電壓信號,經輸出采樣電路的電壓/電流轉換、放大,輸出穩定的直流電流。使用D/A輸出、A/D采樣,與主控單片機形成閉環控制系統。可用鍵盤進行電流數值設定,用LED(發光二極管)進行顯示,智能板卡數據采集框圖如圖3所示。
1.5 信號調理箱
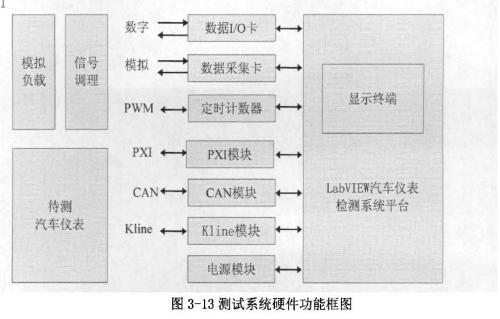
信號調理箱實現信號的調理、采集和輸出。通過分析不同型號陀螺的工作原理,其輸出信號有同步器、模擬量和開關量等信號。根據信號性質,信號調理箱包含S/D、A/D和繼電器等集成電路,能夠將同步器信號、模擬量信號轉換為數字信號,達到與計算機通信的目的。
采用CJ24Y4L和CJ24W型航空智能板卡采集陀螺儀的輸出模擬量。CJ24W航空智能板卡可以滿足模擬信號的輸出,輸出電壓為0~23 V。模擬量采集為24路單端輸入和8路差分輸入,分辨率為24位,可以采集0~300 V的電壓,0~2 A的電流。采集數據精度高、速度快、穩定性好。由于陀螺儀的信號輸出數量多,不可能將所有信號同時輸入到信號調理箱,必須經過繼電器矩陣進行切換,繼電器切換必須具有足夠快的響應時間,能通斷較大的信號,因此選用型號為JDQ航空智能板卡,實現信號的連接、斷開和轉換。該航空智能板卡工作電壓為DC+27 V,信號的采集和模擬均符合航電設備的輸入輸出要求。
2 系統軟件設計
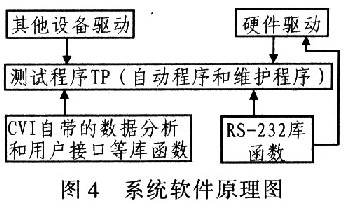
系統軟件采用美國NI公司的虛擬儀器軟件LabWindows/CVI進行設計開發,CVI是在C語言(ANSIC)的基礎上增加了儀器控制和工具函數庫的虛擬儀器開發軟件,具有友好的圖形用戶界面,因此選用CVI可以加快測試程序開發。系統軟件原理圖如圖4所示。

模擬信號相關文章:什么是模擬信號
c語言相關文章:c語言教程
評論