基于DSP的室內慣性導航系統設計

輪式遙控機器人已經應用在地震、火災等一些危險的室內區域進行救援和探測,或執行反恐任務。由于在這些特殊的環境下存在諸多的未知因素,且室內無GPS信號,人們不得不依靠先進的科學技術和儀器來獲取遙控機器人小車的導航信息。但是目前輪式運動小車主要采用的導航傳感方式有視覺、光電、超聲、里程計等,比較容易被外界環境干擾,不能滿足廣大市場的需求。
本文引用地址:http://www.104case.com/article/274609.htm但是慣性導航裝備安置在運載體內,工作時不依賴外界信息,也不向外界輻射能量,不容易遭到滋擾,是一種自立式導航系統,優于上述的導航傳感例子。并且近年來MEMS(微機電系統)結構的慣性傳感器隨半導體技術的進步得到了迅速發展,使其低成本而高精度的期望得到了實現。MEMS慣性傳感器組成的慣性導航裝置結合輪式小車的里程計,能夠產生導航和定位信息,減少對外部環境的倚賴,實現在外部環境條件(例如光照、墻壁材質)未知情況下的導航。
由于是在室內區域進行勘測搜索,小車的運行特點與一般的飛機、船、車不同,它的運動軌跡變化較快,且在運動時存在一定的振動,因此常用的卡爾曼濾波算法需要進一步改進才能應用。慣性傳感器采集數據量大,且進行慣性導航時需要大量的浮點運算,因此本項目采用了具有強大數字信號處理功能的DSP 28335芯片和PC控制終端,實現慣性傳感器的數據采集、時序邏輯控制、與驅動系統通信和地圖顯示功能,具有體積小、成本低、功耗低等優點。
綜上所述,本文將選用低成本的MEMS器件,結合DSP和卡爾曼濾波算法,能實現較高精度的輪式小車導航和定位。
1系統體系架構
本文的目標是研制一個輪式小車慣性導航系統,能夠通過wifi實現PC終端和手持終端控制輪式小車行動以及小車所采集數據的傳輸。
搭建如下圖1所示的系統,TI公司的浮點DSP TMS320F28335芯片作為主數字信號處理器,采集各MEMS慣性傳感器的信號并處理,處理結果通過WIFI將數據輸送到PC終端;PC終端負責顯示定位結果和地圖顯示,并向小車驅動系統發送控制命令,同時接收驅動系統反饋的里程計信息。
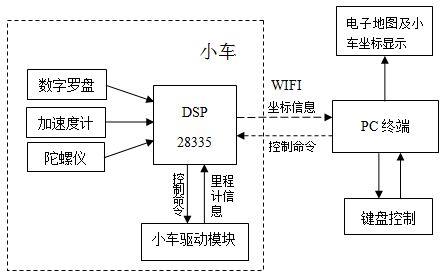
圖1總體架構
2.硬件計劃及詳細實現
硬件設計上,主要分為核心板和驅動板。核心板包括DSP最小系統,JTAG下載口設計,系統電源供給電路和MEMS傳感器,WIFI模塊等。而驅動板主要設計的內容是直流大電機的驅動模塊。
2.1核心板設計
2.1.1電源電路設計
TMS320F28335工作時需要的電壓不同:內核電壓(1.9 V)與I/O供電電壓(3.3 V),對于電源比較敏感,所以電源部分利用兩路輸出電源器件TPS767D318來實現,如圖2所示。同時根據仿真實驗和實際焊接電路的測試,電源模塊輸出端最好使用一些容值不小于10uf的保護電容,且不能使用貼片電容,否則工作不穩定。
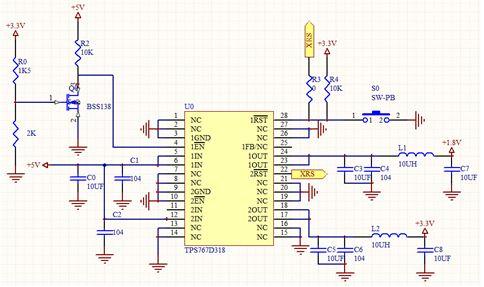
圖2 DSP電源設計











評論