基于DSP的室內慣性導航系統設計

4實驗測試與結果分析
本文引用地址:http://www.104case.com/article/274338.htm在裝置硬件和軟件搭建完成后,通過原先設計好的PC端軟件和平板安卓軟件,搜索到Wi-Fi,自動連入局域網。在實驗室測試環境下,小車可以自由行駛并反饋回實時的數據并進行測試比較。
4.1航向角數據測試
HMC5883L采集到的航向角存在隨機波動性,因此可以對于進行多次采集平均值濾波,以提高系統輸出的數據穩定性。如圖6為一定時間內濾波前和濾波后航向角的數據。

圖6航行角數據采集和對比圖
上圖的數據對比可以得知,航向所采集到的數據進行平均值采樣濾波優化后誤差大大減小,比原有數據穩定許多,說明濾波效果明顯。
4.2角度數據測試
在角度獲得的數據,可以使用ADXL345和ITG3200所得的數據,轉換為橫滾角和俯仰角。再結合卡爾曼濾波對數據進行濾波以達到更準確的實驗結果。如下表1為濾波1前角度的數據及誤差,表2為濾波后角度的數據及誤差。
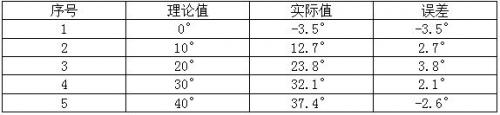
表1濾波前角度的數據及誤差

表2濾波后角度的數據及誤差
由表1和表2的測試數據可知,經過濾波后,最大的誤差從3.8降到-0.4,而且大體上都在1°內,大大提高了角度的輸出精度。
5結束語
本文所設計的輪式小車室內慣性導航裝置,分析了該軟件設計的各個模塊的具體實現方法。經實驗結果表明,該設計能夠實時監測到移動機器人的位置信息,并對其能實現有效控制。同時其低成本、高精度、易操作的特點將進一步應用于例如巡邏機器人、救援機器人等專業領域,必將吸引國內外眾多的投資商對其投資并進行更進一步的研發與應用,使其有著十分廣大的創新創業前景、應用前景和市場前景。











評論