基于SLH89F5162的智能清潔機器人

電機驅動模塊為清潔機器人的行駛提供動力,機器人啟動、行駛和剎車時電機都會需要較大的驅動電流,該模塊必須能夠提供足夠的電流并保證發熱量不會太大。本系統選用了驅動芯片L298N.
本文引用地址:http://www.104case.com/article/273932.htmL298N是ST公司生產的一種高電壓、大電流電機驅動芯片。該芯片采用15腳封裝。主要特點是:工作電壓高,最高工作電壓可達46V;輸出電流大,瞬間峰值電流可達3A,持續工作電流為2A;額定功率25W.內含兩個H橋的高電壓大電流全橋式驅動器,可以用來驅動直流電動機和步進電動機、繼電器線圈等感性負載;采用標準邏輯電平信號控制;具有兩個使能控制端,在不受輸入信號影響的情況下允許或禁止器件工作有一個邏輯電源輸入端,使內部邏輯電路部分在低電壓下工作;可以外接檢測電阻,將變化量反饋給控制電路。使用L298N芯片驅動電機,該芯片可以驅動一臺兩相步進電機或四相步進電機,也可以驅動兩臺直流電機。
引腳J1可用于輸入PWM脈寬調制信號對電機進行調速控制。(如果無須調速可將兩引腳接5V,使電機工作在最高速狀態。)實現電機正反轉也很容易,輸入信號端IN1接高電平輸入端IN2接低電平,電機M1正轉。(如果信號端IN1接低電平,IN2接高電平,電機M1反轉)控制另一臺電機是同樣的方式,輸入信號端IN3接高電平,輸入端IN4接低電平,電機M2正轉。(反之則反轉),PWM信號端A控制M1調速,PWM信號端B控制M2調速。可參考表2-2:
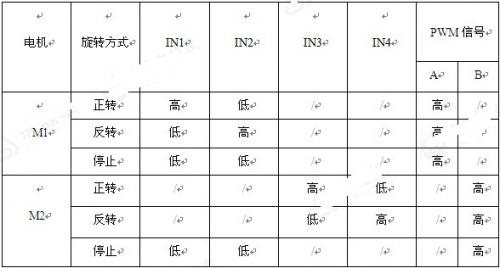
表2-2驅動模塊控制表
清潔機器人必須知道自身位置,在特定位置或區域進行特定的動作,完成對房間的吸塵任務。它需要通過傳感器進行障礙檢測,并將障礙物信息傳送給MCU,進行決策,最終完成全區域路徑覆。障礙探測是指由各種傳感器組成的傳感器陣列對周圍未知環境進行探測。整個傳感器陣列就像是清潔機器人的“眼睛”,收集周圍未知環境的某些信息。清潔機器人中的傳感器數量比較多,相關的有用于環境感知的傳感器、自身定位傳感器,種類繁多,將這些傳感器的信息有效融合是一個重要問題。
方案l:避障用激光傳感器,激光傳感器是一種利用激光技術進行測量的新型傳感器。它由激光器、激光檢測器和測量電路組成,具有能實現無接觸遠距離測量、速度快、精度高、量程大、抗光、電干擾能力強等優點。缺點是激光傳感器價格昂貴,外接電路設計十分復雜,不適合小車的需要,因此放棄該方案。
方案2:避障用超聲波傳感器,超聲波傳感器是一種利用超聲波的特性研究的測量傳感器。它主要由壓電晶片組成,用來發射和接收超聲波。超聲波在空氣里傳播時,會因不同介質的聲阻抗不同而產生反射,因此測量發射接收信號間的時間差,可以得到障礙物的距離,該信號經過運算放大器,傳送給控制芯片LPC2132,LPC2132發出控制信號改變小車的轉向,作出對障礙物的正確判斷。超聲波傳感器的優點是反應速度靈敏,可測距離遠,收到外界的干擾小,缺點是超聲波在小空間不同方向里會進行多次反射,當和障礙物形成一定角度時,會發生鏡面反射,產生幻影,從而動作混亂。
方案3:避障用紅外光電開關。紅外發射器發出紅外線,遇到障礙物后,光線反射回來,接受的光感三極管導通,單片機接受到相應的電平信號。其優點是對近距離的障礙物反應速度靈敏,信號之間抗干擾能力強,缺點是距離要求近,容易受自然光的影響。經過傳感器性價比和課題實際要求的綜合分析,超聲避障實現方便,技術成熟,是移動機器人常用的避障方法,因此我們選擇超聲波傳感器作為機器人的眼睛[5]。
本系統中采用了US-100超聲波測距模塊,可實現2cm~4.5m的非接觸測距功能,擁有2.4~5.5V的寬電壓輸入范圍,靜態功耗低于2mA,自帶溫度傳感器對測距結果進行校正,同時具有GPIO,串口等多種通信方式,內帶看門狗,工作穩定可靠。
遙控可以使機器人的操作更加方便,本系統中要通過智能手機遙控機器人,而智能手機的信號正是通過藍牙發出,因此只需在機器人上安裝藍牙模塊。由于機器人只接受數據,不發送數據,所以只需藍牙的從機模塊即可。
本系統中采用了型號為HC-06的藍牙模塊,其中編號06就表示其為從機模塊,在藍牙模塊的命名規則中偶數命名的型號出廠時就確定了從機,并無法更改。用戶不可以自己切換主機或者從機,用戶可以空過AT指令集對藍牙模塊進行配置,AT指令集較少,包括修改藍牙名(限于從機),修改密碼,修改波特率,詢問版本號等幾個基本功能。
電流變送器相關文章:電流變送器原理 光電開關相關文章:光電開關原理 脈寬調制相關文章:脈寬調制原理 激光器相關文章:激光器原理









評論