基于ARM單片機的智能旋轉倒立擺系統設計

2)其中要求(2)當擺桿高于水平位置時就不再進行控制,靠慣性就可完成圓周運動。
本文引用地址:http://www.104case.com/article/273185.htm3)要求(3)中實現倒立擺保持倒立狀態,再進行直立控制時可通過導電塑料電位器返回的角度值與180°進行比較作比例控制,可以用軟件求得角速度來作微分控制。然后利用測速導電塑料電位器測得的旋轉臂的轉速進行速度的比例和積分控制,從而可以使擺桿在某一點附近完成倒立。
4)完成要求(4)、(5)兩項算法與之前相差無幾,只是在開始用角度的比例控制使得桿快擺到最高點處的某個位置時轉入直立控制即可。
5)完成項目(6)的算法與之前發揮部分的區別在于,在直立控制開始時延時一段時間,待其穩定后,給定一個速度設定值,擺桿即可沿著一個方向做勻速圓周運動。
PID控制器的差分方程
式中 稱為比例項;稱為積分項; 稱為微分項;
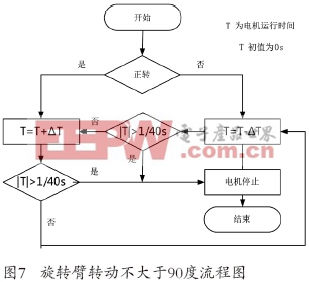
系統軟件流程圖如圖6所示。
通過不斷地調試,測得要求(1)的比例系數Kp=45.0,要求(2)的比例系數Kp=110.0,要求(3)的比例系數Kp=1800.0,積分系數為Kp=450.0。項目(4)、(5)、(6)的比例環節控制擺動的系數Kp=85.0,直立環節系數Kp=2600.0,Kp=250.0。
6 系統測試方法與測試結果
6.1 主要測試儀器(見表1)
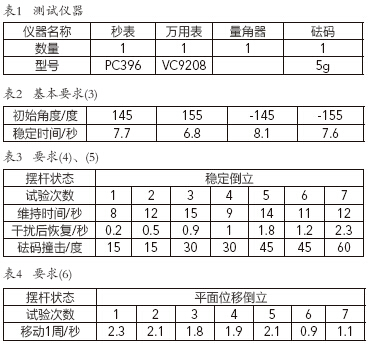
6.2 測試方法與測試結果
要求(1):實驗中發現簡單設定電機正反轉時機,即可實現要求(1)、(2);為滿足要求(3)中的旋轉臂轉動不超過90度的限制條件,所設計的程序對應流程圖如圖6所示。此時做出來的實驗數據才有意義。實驗結果見表1。
要求(4)、(5)、(6):從擺桿保持倒立狀態時開始計時,實驗結果見表3、表4。

pid控制相關文章:pid控制原理
pwm相關文章:pwm是什么
伺服電機相關文章:伺服電機工作原理
pid控制器相關文章:pid控制器原理
低通濾波器相關文章:低通濾波器原理
加速度計相關文章:加速度計原理








評論